The
Beamway – Technical Details
by
Olav Næss
Introduction
The
Beam
The
Track Curvatures
Are
Strong Beams Needed?
The
Poles
In
City Streets
Along
Roads
Beam
Suspension without Poles
Movable
Beams
Crossing
Water
The
Submerged Floating Tunnel
The
Wheels
The
Trains
The
Elevator
The
Electric Motor
Hovering
Trains
Compressed
Air Hovering and Propulsion
No
Wheels at all?
A
Universal Bogie
Double
Action Air Cushion
The
Linear Motor
The
Suspension
Proactive
Suspension
Transversal
Force Control
Spine
Trains
The
Cabins
The
Load-carrying Capability
The
High-speed Train
Beam
Irregularities
A
Compromise Bogie
A
Lighter Beam
Switching
Wagon
Exchange
The
Control System
Collecting
Energy
Building
a Beamway
Tunnels
A
2C Metropolitan System
GTS
Safety
Scalability
Conclusion
Introduction
High-speed
trains and other passenger trains should carry 6-8 tons in a wagon,
so why should they use a train concept for carrying 100 tons? The
discrepancy is partly due to the need to go on the ground.
The minimum
weight for trains running on the ground was demonstrated in February
2007 when a train was derailed by snow masses on a Norwegian mountain
line. The train — called a Signature train — consisted of
motorized wagons, each with 72 seats and weighting 54 tons. A local
train expert told the media that he had warned against using such a
light train, as it could slide like a snowboard and derail. A heavier
locomotive, which could push an efficient snow plow, should be used
in front.
In warmer
climates, where snow masses may be disregarded, trains must still be
built to survive collisions with cattle and other large animals, as
well as crossing road vehicles. If the track were lifted 4-5 meters
above the ground, resting on pillars, both snow mass disturbance and
collision danger would be virtually eliminated, so now lightweight
technology could be employed. A positive feedback is encountered
here: Rail elevation enables light trains, and light trains are easy
to elevate above the ground. Such positive feedback situations can
create quantum leaps in technology, and this effect seems to be
effective here.
An empty
lightweight wagon for 70 passengers could weigh only 5 tons, against
40 tons for the railway wagon (according to the now closed Hytran
website). If the total weight is used, with motorized bogies, it
becomes 6.4 tons, but this weight can be compared with a 40 ton wagon
among 6-7 such wagons pulled by an 80 ton locomotive. In both cases
the beamway train has only 1/8 of the weight. The 70 passengers in
the railway train have a 25 meter long wagon, while the 70 in the
beamway train have 16-18 meters, so it may be more correct to use the
ratio 1/6. If the weight of the passengers equals the weight of a
light wagon, the ratio becomes 2/7.
The use of such
elevated rail creates a new paradigm for ground traffic: multi-level
ground traffic – without the clumsy creation of new ground
levels by using huge amounts of concrete. This elevation could reduce
the railway's ground occupation, ground razing and blocking effect
(preventing access/crossing for people and animals) by something like
99%.
A conventional
railway track is so wide that the train can easily balance on top of
it, and this works fine on a flat surface. But when the track is to
be elevated on top of pillars, it should be designed like a stiff
beam. This means: It should be thick vertically, but narrow. A wide
beam will be heavy, expensive, and often annoyingly overshadowing.
The train should not try to balance on top of a wide beam, but
achieve stability by wrapping partly around the upper part of a
narrower beam. We now have a straddling monorail,
also called the Alweg
type train.
The
train itself can be lightweight, but the track — normally a
concrete beam resting on concrete pillars — has some problems:
The
beam becomes a barrier between the train and the ground below, so
that the train cannot have an elevator for arriving and departing
passengers, but needs expensive raised stations (with elevators) at
all stops — unless the railway has a reserved area allowing
the track to go low at stations. (The elevator also functions as a
sluice mechanism including a scale (measuring the weight), so that
train overloading can be automatically prevented.) If trains lack
elevators, safety regulations may very well demand gangways (with
handrail) along all tracks.
The
wheels run on top of the beam, where they often will be disturbed by
snow, ice and birds – prone to occasionally cause bird
massacres.
Having
trains on the top makes it difficult for the track to take long
jumps by having a steel beam suspended under a catenary
cable — like an ordinary suspension
bridge is suspended under two.
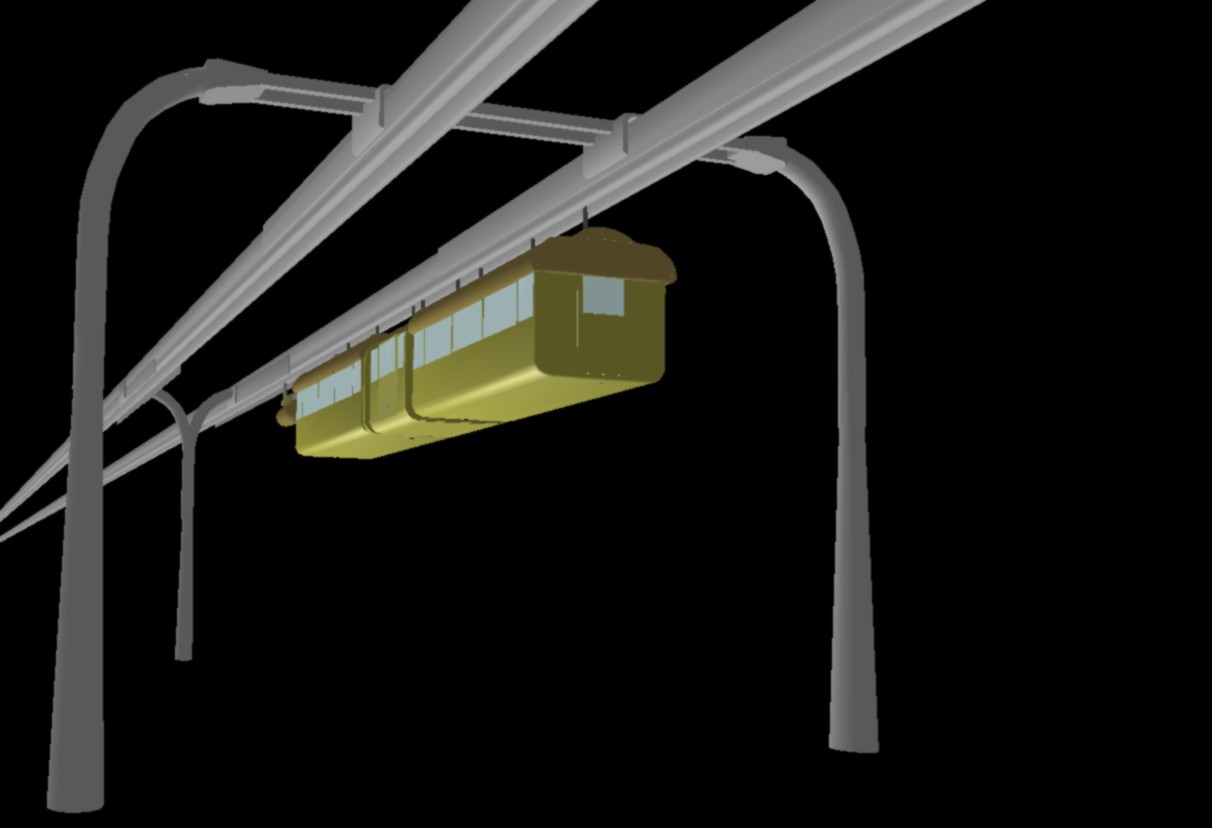
So we let the
train hang under a steel beam, and now we have a suspended monorail,
also called a SAFEGE-type
monorail, or a beamway.
Both the
straddling monorail and the suspended beamway have found limited use,
having been found suitable only in cities which have been diluted by
having been shaped by The Car. They both have been given elevated
stations having stairs and elevators. And with this complexity, it
may suddenly be found that stations may have to be manned. Old,
compact cities haven't room for such station buildings in their
streets, and for small rural places, stations should not have to be
manned. If trains can have built-in elevators, they can stop almost
anywhere – a huge boon for both old cities and for rural areas.
The straddling train is now disqualified in this discussion, as its
beam prevents the use of an elevator.
The
other improvements to be proposed here mostly aim at making the
beamway better for rural use – with high speeds. The most
important points of this proposal (making this design novel and
unique) are:
Elevator
in the train (described in the introductory
article)
Exchangeable
passenger cabins
(or containers)
The
uniquely composed 2C beam (see the next chapter)
The
weight distribution control (– described various places below)
The
air
cushion hovering schemes: partial levitation (with wheels) and
full hovering (without wheels)
Double
Action Air Cushion
gives strong
strong stability against penduling by dynamically changing between
pushing and pulling the beam
This
technical document doesn't contain all the improvement suggestions.
Several other points (easy to explain and understand) are described
in the introductory
article.
The
Beam
The
beam is the central element in this transport technology. The other
elements, like trains, wagons, bogies and poles, can easily be
exchanged at any time, but the beam is the immutable factor which is
most responsible for the success or failure of a beamway line.
Our
point of origin is SwedeTrack's
FLYWAY design, which had chosen the monolithic German SIPEM steel
beam. Monolithic
means:
The beam is not split up lengthwise, but has contiguous steel in a
cross-section. This gives the beam high strength and stiffness in all
directions - horizontally, vertically and combinations of these, as
well as against twisting. But, as beamways should be built with
graded turns, only the ability to resist downwards-directed forces
needs to be strong.
It
should now be noted that beamways are presently only used for local,
low-speed lines, having failed to be chosen for long distance,
high-speed lines. (The top speed is 65 km/h on SIPEM beams.) For
high-speed applications, the builder needs to bend the beam for
controlling the curvature and twisting of the line.
Each
side of the beam will normally need a gutter - a track (for wheels
and/or air cushion pads) with side walls, and this should be firmly
attached to an I-shaped beam, which is optimal for resisting vertical
forces. The combination will give a J-shaped beam component whose
gutter part shape may be more or less rounded. (An exchangeable
gutter is likely to be dead weight rather than a beam-strengthener.)
The
significant characteristics of the beam is:
the
size and shape of the gutter, both the upper and lower side
the
height and width of the space for wheels along the inside of the
I-beam (J-beam wall)
The
position and width of the bottom of the power line. (As this is in
the middle of the beam, the width of the beam is now given due to
the symmetry.)
When
these properties are given, the beam may be produced in a monolithic
version, in which a steel roof connects the tops of the J-beams. A
holder for the power line (probably going down in the middle) may
also be a part of this complex steel profile.
The
monolithic beam may be replaced by two J-shaped or C-shaped
half-beams, having the walls out to the sides, one half-beam for each
track. The C-shaped version is symmetrical, having similar gutters in
top and bottom.
This
symmetry has some advantages:
When
a half-beam is worn or sagging, it can be rejuvenated by being
turned upside-down.
The
profile starts functioning more like the commonly used I-beams and
H-beams, in which the upper (compressed) and lower (stretched) parts
are similar and balanced.
Using
a pair of half-beams (supplemented by a plastic "raincoat"
and power line holder) has several advantages compared to a
monolithic beam:
For
rural lines, when curvatures are moderate, the half-beams may be
given the correct curvature at the construction site. And when the
beam is to be banked in turns, the beams before and after the turn
can be twisted as needed for increasing and decreasing the banking.
(Highly curved low-speed beams will probably have to be produced in
standard curvatures.)
A
half-beam will have less than 50% of a monolithic beam's weight, so
much longer lengths can be handled. Fewer splices means safety.
Dangerously
weak track parts where consecutive beams are spliced needn't occur
at all, as the half-beams may be staggered: Have their splices far
apart, e.g. at different poles, so that the half-beams become
splints for each other. (When the line changes inclination, both
half-beams should have their splices together, but this will quite
certainly occur over firm ground - a hilltop or a valley bottom.)
The
beamway line can extend itself over difficult terrain which is
inaccessible to the heavy machinery needed for lifting monolithic
beams in place – because less than half the weight has to be
lifted forwards at the same time.
If
a beamway line is built thousand of kilometers away from the
steelworks, it is very valuable that a shipload of standard
half-beams can be ordered, rather than having to repeatedly order
custom-made curved and/or twisted beams. A beamway line can easily
be reconfigured by simply moving around the racks and poles carrying
it, but this requires the flexible, standardized half-beams.

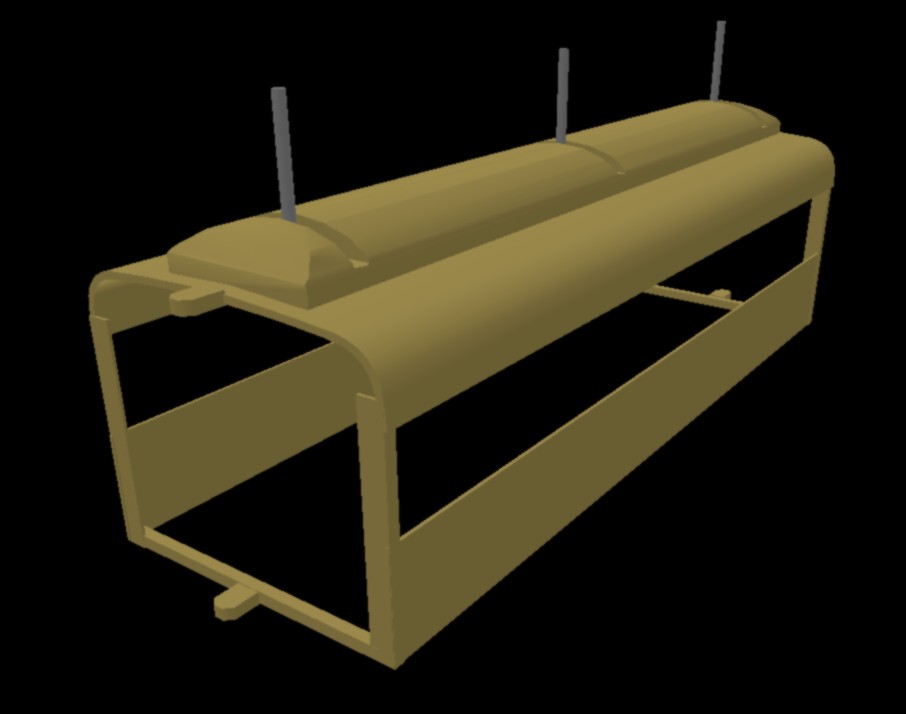
The
proposed design, as shown in the illustration, is based on two
symmetrical C-shaped half-beams, so we may call it the 2C-beam.
The
top of the two half-beams are clamped together so that they act as a
single beam – mainly to prevent derailing. Such steel clamps
should be placed on at least the middle part of the beam – to
limit the separation of the half-beams. Strong versions of these
clamps can be used as supplementary suspension points when the beam
is hanging under e.g. a cable. They may be long enough to hold a
(single half-beam) splice in a staggered beam.
The wheels shown
have reinforced hard rubber without air, and they contain a hub
motor. This picture is not a true cross-section, as the wheels may
not run side-by-side (which will improve the aerodynamics), and the
little pantograph going up to the (copper and aluminium) power line
will not be adjacent to a motor.
The
half-beams should be more economical to produce, and simplify the
logistics, transport, and track building. The lengths supplied will
depend on the splice method:
If
both half-beams have splices together at the poles, splints will be
used at the poles (as explained under The
Poles
below),
and the standard half-beam length might be 40 meters.
If
staggered beams are used, splints are not used, and the standard
length will be the distance between two splint-less poles: 60
meters. (The pole at the middle of one half-beam will hold the
splice of the other half-beam.)
Conventional
trains and ships can transport 70 meter long goods, so the 60 meter
lengths should not be too problematic. This transport is only needed
to the most accessible part of the beamway line, like a harbor or
railway line. (A temporary line extension down to such a place should
be quite feasible.) This is where the work with building the line
starts, and then half-beams are transported by the beamway which
extends itself.
The
half-beams should have the same profile along the entire length, and
not have flanges for splicing. This means they can be cut as desired.
Flanges on the inside would be a waste of space, hard to
connect/disconnect, and they would transform minor run irregularities
into major crashes. Flanges on the outside would be clumsy and ugly.
During
the construction work, or during later maintenance, half-beams can be
bent as follows by a bender
– an
extra strong, mobile beam running like a wagon. It has a truss
design, being perhaps two meters high and one meter wide, and is
suspended under two extra strong bogies at its ends. It can grab the
middle part of a half-beam either mounted above it or being
transported near it, and then bend by pushing or pulling. Alternating
between bending two half-beams is much easier than bending a
monolithic beam.
One
kind of construction time bending is valuable: The SwedeTrack page
says: "the beams could be prefabricated with an upward bent".
This means: When the beam is bent down by the weight of a
passing train, it becomes straight. But this assumes a certain speed.
If the speed becomes higher, the train has to lower itself at
each mid-beam.
If
there are concerns about metal fatigue caused by repeated bending, a
sagging half-beam can be turned upside-down instead. (A half-beam in
a curve must be rotated so that its ends exchange positions.)
The
pole separation can be considerably increased if there is a tall mast
on top of each pole, and a strong cable connects the top of each mast
with the middle of each adjoining beam. (Carbon fibers are becoming
strong contenders to steel for this purpose, and nanotube fibers will
probably become cost-efficient in the future.) The middle of the beam
can then be pulled up as much as needed. If sagging at the 50% point
is then replaced by sagging at 25% and 75%, a properly positioned
bender can fix this, too.
Bending
the beam vertically – for a track passing a hilltop or a valley
bottom – is a more awkward matter, but it may not be needed,
thanks to two design features which we will come back to later:
A
transition zone, some meters long, where two beams meet at a pole.
This will soften up the track profile somewhat, even if the zone has
no curvature, but just an intermediate inclination.
(More
about this in The
Track Curvatures below)
The
track should have banking in curves. Hanging cabins get their correct
side tilt quite automatically, but the wheels need to be relieved of
brutal side forces. A simple thing to do is to mount a curved beam in
a tilted position, so that its middle part is elevated. To maintain a
level track, implies bending half-beams also in the awkward vertical
direction, and this may not be practical. When banking starts and
stops, the bogies need some time to tilt to the side, so they can't
suddenly be introduced to a tilted beam. A long transition zone
between beams, having a twisted track, could do the job for low
speeds, but it shouldn't be too difficult to twist the half-beams
which are at the ends of a turn. It would be a logistical nightmare
to provide monolithic beams with different combinations of curvature
and twisting; It is far simpler to twist and bend half-beams.
So
far, with only the half-beams held up by the poles, we have only a
coarse railway, useful only at moderate speeds, and for self-powered
(e.g. diesel) trains only. But this will be OK while the
railway is being built. We will now consider some additions
before the beam is ready for ordinary use.
The
asymmetric profile of a half-beam will cause it to be twisted when
the middle part is weighted down: The lower part will be bent
outwards, and the upper part will be bent inwards. This will alter
the track separation and cause problems for bogies having fixed axle
lengths. The FLYWAY
design calls for ribs
on
the outside of the beam to prevent this twisting. But these increase
the cost and constitute a serious visual pollution which will give
people the impression of being in a factory, so we should try to
dispense with them by avoiding wheels being paired by axles –
see A
Universal Bogie
and
A
Compromise Bogie,
both able to adapt to varying half-beam separation. And the
distribution of steel in the thick (upper and lower) part of the beam
should be fine-tuned for minimizing this twisting.
Finally,
the beam is provided with a plastic cover which:
stretches
down in the center of the beam to hold the power line for electric
trains. Less copper is needed here if it is sandwiched between
aluminium profiles which help conducting current (– except in
the transition zone). Two copper cables needn't be spliced if they
meet between such aluminium profiles.
might
have a useful sound-dampening effect if it covers the sides of the
beam. Also light-weight solar cells may be used here.
has
a groove for a fiber optic cable. The beamway will probably
not need this, but all long-distance construction projects should
grab such an opportunity for simple and safe cabling. (If a train
has to be run remote controlled by an operator, the fiber optic
cable will be needed for at least one high definition video feed.)
It should be very fast for a service train to insert this cable
while it is running – and to backtrack and remove the cable
when the workers learn that the cable should have taken a detour
wherever the beam can be opened.
Some
additional details will become evident when we describe how the
railway can be built, and some beam profile characteristics will also
be discussed below – under The
Wheels.
The Track
Curvatures
The
horizontal curvature is limited by the sideways movement capability
of the suspensions, as described in In
City Streets
below.
But this applies to low speeds only. For normal running speeds, the
curvature will be limited by the maximum allowable centrifugal
acceleration at the speed to be used. A suitable limit might be .5 G,
or 4.9 m/s². This will cause a 30°
tilt,
and a 12 % ("weight") force increase in the suspension. The
minimum track radius for a speed v will be: r = v²/4.9. For v =
200 km/h = 55.6 m/s, r = 630 meters. When the curvatures are hundreds
of meters, the beams should be bent at the construction site. But
this calls for beams split lengthwise: the 2C beam.
The
vertical curvatures are determined by the peaks and valley to be
traversed. When height differences are small, the track should be
kept even by adjusting the pole heights. But if the landscape has
major peaks and valleys, there must be slopes between them. The
beamway trains will not have any problems with slopes like e.g. 10 %.
The slope transitions, however, are potentially more problematic in
practice. This could be called the vertical curvature, so should we
try to use beams having vertical curvature? Beams must have large
vertical stiffness, so it would be difficult to bend them vertically.
There
are two considerations here:
Having
the beams curved vertically (or having transition track pieces with
intermediate slope between succeeding beams) will smoothen the ride,
but not remove the real problem: A wagon in the middle of a valley
will have its end bogies high and its central bogies low – and
conversely when on a peak. The wagon's ability to handle this
situation depends on the piston travel length in the lifter –
see the cross-section diagram in A
Compromise Bogie. A suitable travel length for this piston could
be 20 cm. A 20 cm height difference between a middle and end
suspension (11.4 meters apart?) of a 24 meter long wagon means:
.2/11.4 = 1/57 radian = 1°. That is: The slopes of two succeding
beams should differ by less than one degree.
If
maximum vertical curvature is needed, the beam length should equal
the wagon length. Starting or ending a 10% slope will then take at
least 9 intermediate beams, with a total length of 216 meters.
On
a city track, where wagon lengths up to 12 meters are used, the slope
increment will be doubled to 2 degrees, and if anybody should care to
use 12 meter long beams (feasible in tunnels), the 10% slope could be
started or ended (with four intermediate beams) in just 48 meters. If
long wagons are needed in such difficult places, they can have a
simple articulation in the middle. These need only bend 2 degrees in
the middle, and perhaps only vertically, so those awkward bellows
shouldn't be needed.
It
might be useful to have beams with a vertical curvature delivered
from the factory – at least as an alternative to using 12 meter
beams. Or old, sagging beams will be appreciated. Anyway, the
symmetry of the 2C beam will be valuable now, as we needn't
distinguish between valley and peak beams.
In
a track with staggered beams – where the half-beams are not
paired, but are splints for adjacent splices – there is no
opportunity for proper slope increments. If a span with staggered
beams has to curve over or under a central obstacle, vertically
curved beams are needed.
Are
Strong Beams Needed?
It
may seem obvious that heavy trains will need a strong and rigid beam,
but this isn't really the case if we are able to control the load
distribution. We can check this out with a multi-step scenario.
We prove our point already in step 1, and then we will relax our
assumptions and become more practical.
We
have no beam at all – just short rings on top of the poles,
and they are fully lined up. The train is like a spear: stiff, but
unable to rotate, and may be quite heavy. It is more than twice as
long as the distance between the poles. There could be motor driven
wheels in the bottom of the rings.
We
reduce the stiffness of the train by giving it some ability to bend
sideways, but not vertically. We also connect a flexible tube
between the rings. Its purpose is to guide the train to the next
ring, but it needn't support any weight. The first part of the train
(10 %?) should be able to bend a little in any direction, so that
its sides will receive the guiding forces. Our train can now do
turns in the horizontal plane.
We
transfer the passengers to wagons hanging under the spear (because
of numerous complaints about the bad conditions in that narrow
tube). The spear is now just a bogie, acting as a spine, but its
beam (tube) loading is still negligible.
We
want to put the wheels on our spine bogie instead. (It was
impractical to spin up and power all those pole wheels, and we
wanted to distribute the weight over many wheels.) We also
want conventional independent bogies, so the spine stiffness is
moved down to the train instead. And still it works: The
rigidity of the train causes the weight of the train to be carried
only by the (somewhat lengthened) rings on the poles, not on the
weak and yielding tube connecting them.
But
now we must leave paradise: We can't stay in one plane, as the train
has to go uphills and downhills, and it has to bend also vertically
when passing the top or bottom of a hill. (We had a train for
the comfortably flat Netherlands and Denmark, but not the
beamway-needing Switzerland and Norway. There is a limit to
how much height variations can be eliminated by means of tunnels,
bridges and varying pole lengths.)
We
have now two tricks to remedy this situation:
The
simple: Spread the beam loading to the first and last part of the
train. We do this by pulling the wagons together at the bottom and
pushing them apart at the top. Our special “Exchangeable
cabin” philosophy is well suited for this: The rigid frame on
top of the modules is eminently suited for pushing apart, while a
lightweight cabin easily can exert a pull through its floor.
This
should, however, be done to a limited extent with long trains, as
the load at the ends would become too great.
The
complex: Use the active suspension of the train in such a way that
the weight of the train is shifted to the bogies which are nearest
to a pole. (See “Proactive Suspension” below.)
This method is important for long trains, which could transfer their
load to at least two poles, and may not really need to put load on
beams. The spine, originally able to bend only sideways, must be
replaced with a version with dynamic rigidity: It will vertically
always actively assume a dynamically rigid shape which is a copy of
the track profile covered at that point of time – except that
it will not follow a yielding beam downwards.
It
should be noted that if these load distribution schemes fail, the
beam will not collapse, but will (due to the excellent overload
characteristics of steel) cause added downwards bending (sagging) of
the beam, thus necessitating half-beam reversals.
A
useful design for the spine train in point 4 above: The train has a
vertical chassis plate (a light framework) which hangs below the
center of the beam. It becomes a flexible spine by being divided (by
vertical cross-sections near each bogie-held suspension) into
sub-plates, which are connected to each other by double hinges. That
is: There is a hinge at both the upper and lower end of a sub-plate
connection line. This point is important when we try to adapt to
point 5 above (vertical flexing): The upper or lower hinge must be
designed so that the sub-plates can here be pulled together and/or
pushed apart. (See the cargo wagon picture below.)
Such
a central chassis would be OK to hang cargo containers on (on both
sides), and it can distribute the weight over a much greater distance
than the total cabin length, but the passengers would not like to be
separated by such an iron curtain. We might now try to find remedies
for this problem, and should bear in mind that we could make quite
large holes in the chassis plate without losing much strength. In
fact, it is common practice to make large holes in such structures in
order to save weight, but this works best with circular holes.
We
could make holes for doors: would work, but the wagon would be
strange, and we would have no useful cabin for use elsewhere.
The
entire cabin could be placed in a huge hole of the chassis:
Satisfactory chassis strength might be obtained if the chassis gets
ample space around each cabin, but the cabin could not be lowered
down.
The
chassis could be shaped to fit around a decent cabin: along half the
roof, then down along a side wall, with large openings for the
windows. The main problem with this chassis is that it is
absent at the middle of the floor level, where wagons should be
firmly connected. Besides, it would probably be ridiculed for
its strange asymmetric shape, and the aerodynamics of such a
perforated plate would be bad. (This was the design I played with in
the beginning.)
The
exoskeleton
The
exoskeleton is symmetric, and it fits around a cabin on three sides.
The lower crossbars improve the solidity and enables solid connection
between wagons also at floor level. The exoskeleton would probably be
so strong that vertical bars between the windows can be dispensed
with. This will improve the aerodynamics as well as the appearance.
Quite weak cabins can now be used, but it should be asked: Wouldn't
the extra weight of the exoskeleton offset the strength gain? Is
there any point in its ability to push at the floor level if just a
pull is needed there (which a cabin can easily do)?
If
we don't need the exchangeable cabins, it will of course be simple to
make the exoskeleton invisible by integrating it into the walls and
roof of a quite ordinary passenger wagon.
Regarding
the vertical chassis, it should be remembered that the train must be
able to bend sideways at every second suspension point, and passenger
cabins will normally need at least three suspension points. Bendable
cabins would be rather awkward, and so would a flexing chassis plate
near a rigid cabin. The solution is clearly: Let the suspension
points be able to shift sideways above the roof of the cabin,
preferably integrated in a suspension unit which also deals with
vertical movements. This was anticipated in the picture above.
Conclusion:
Try to transfer the functionality of the vertical chassis into the
design of the cabins and their suspension.
The
Poles
The
purpose of the poles is: to lift the beam so high over the ground
that there is room below for the train + ground activities which
should not come in conflict with the train.
A
pole consists of:
The
base should preferably be embedded in the ground, but if this is not
practical, it should extend along the ground surface in perhaps both
dimensions, depending on whether or not the upper part of the pole
has any support from the side. If the railway track is to follow a
city street, the edge of the sidewalk may be the only suitable place
for the poles. It may then be practical to use a base which extends
only along the edge of the sidewalk. But that would be OK if the
poles stand in pairs, one on each side of the street, forming a rack
, a rectangular arc, by being connected by a horizontal support beam
under which the rail beam is mounted.
Two
beams, for two-way beam traffic, can thus go along the middle of the
street, and that may be the only practical placement if the street is
lined with trees. Considerable street zig-zagging can be
smoothed out for the beamway if beams are suitably placed on such
wide arcs, and by alternating between arcs over the street and poles
e.g. near street corners.
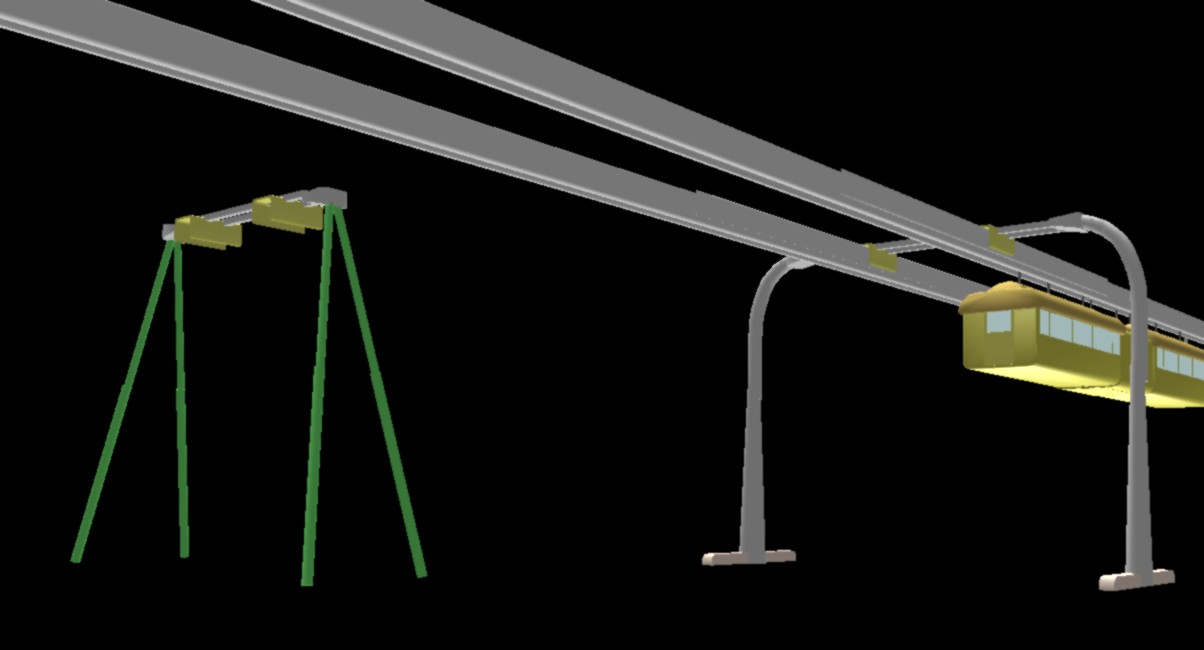
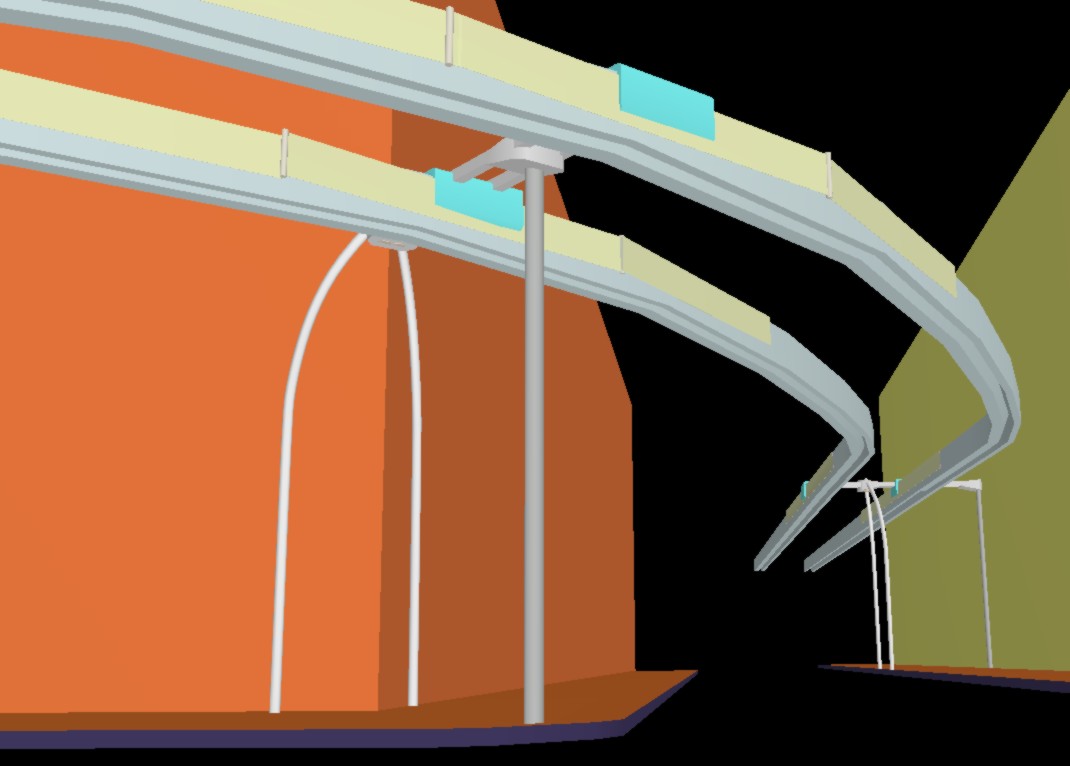
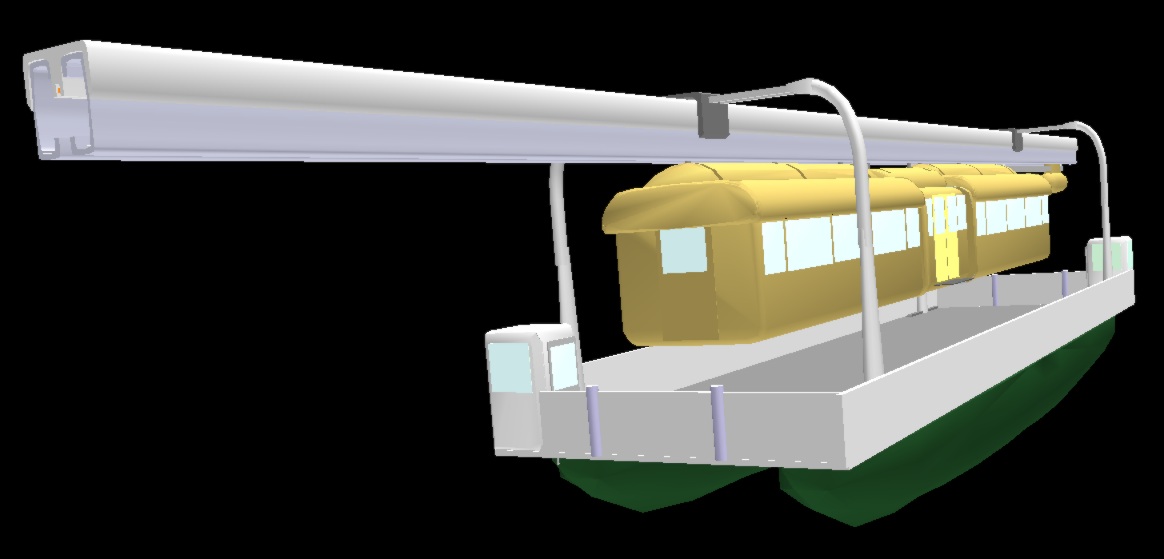
The
double pole shown above is very stable if it holds the beam at a
fixed angle. All the poles may then simply stand upon the ground –
although wide feet as shown below will be convenient before the beam
is fastened. Even the forces from emergency braking can now be
handled, as the beam will distribute the forces between several
poles/racks. The stability may be so good that every second support
can be a single pole (as shown in the background in the picture
above) which simply stands upon the ground, thus dealing only with
gravity.
Such
poles – able to simply stand upon the ground – can really
simplify beamway construction across shallow water.
The
pole stem may be telescopic, at least in uneven terrain, to contend
with varying height requirements, and to fine-tune the track for high
speeds. Along the stem it may be nice to have one or two channels,
covered by a lid which can be opened when cables are to be mounted in
a channel. A channel may be dimensioned so that an ordinary
collapsible fire escape ladder fits into it when the lid has been
removed.
The
beam holder on the top of the pole is bent to the side so that the
train passes at a safe distance from the stem – even if it
swings to the side. A pole should be designed to carry two beam
holders, pointing in opposite directions, so that it can carry two
beams, for two-way beam traffic. (This is seen in the
background in the above picture.)
Here
we see some free-standing multipod “poles”, suitable for
a provisional beamway line. The type to the right may become the
standard type, normally used with the feet buried.
Poles
should also be prepared to hold street lights and signs.
The
upper end of the pole should not be attached directly to the beam.
The end should hold a strong transition bracket, shaped like an
upside-down U.

Here
we see how the transition bracket holds 4 steel tongues, each able to
hold the end of a half-beam. Each tongue is attached to an
internal slider on the inside of the transition bracket, so that
varying half-beam lengths can be accommodated.
The
transition bracket is held up by two horizontal steel rods which are
held by a pole or between two poles.

Here
is a section of the same. (The tongue must be thinner if large wheels
are used.)
If
the beam is fastened only by the tongues which are inserted under the
top of its ends, only careful construction traffic is possible –
mainly transport of the splints, which will give the beamway improved
solidity.
This
picture clearly shows a gap between the half-beam and the bracket
wall. This is the space for the splint.The splint is a steel
plate as high as the beam, a few centimeters thick, and extending
perhaps 10 meters to each side, firmly holding the half-beams, and
strengthening the whole structure like the splint at a broken bone.
It should have tapered ends which visually blend with the beam –
no point in getting visual noise here.
When
the beam has been properly fastened, any gaps in the railway can be
bridged by means of short rail pieces which are attached directly to
the splints.
The
splint may be mounted inside the bracket before the half-beam is
mounted, but it should be possible to press it up afterwards, as the
half-beams should be able to move their lower parts sufficiently
sideways – even if the splints are mounted from a vehicle which
rolls on this unfinished beam.

Here
is a bracket which can be used for clamping together a half-beam and
a splint.
Similar brackets may be used for cable
suspension, and the splice for a single half-beam (in staggered
configuration) may be covered in this way.
The curled end of this
bracket should preferably go into the split edge of the
beam.
When
I propose that beams should be joined at the poles, I disagree with
FLYWAY, who hold that beam joining should be done at the inflexion
points, because this is where forces trying to bent the beam are
minimized. Yes, it is tempting to choose these points, but the
bending forces are easy to deal with when we can use strong (and
heavy) splints which are mounted with their centers of gravity on the
poles. If the beams are firmly fixed for 20 meters at a pole, it is
like having a 20 meter wide pole. The 30 meter pole separation
required by the Sipem/FLYWAY design will now become a 50 meter
distance between pole centers, but it may be more realistic to assume
this job of “pole widening” is only done halfway, so we
will operate with a pole distance of 40 meters.
Another
advantage of this firm beam fixation: Between the beam ends there may
be a short stretch with rails which are held by the splints. (There
could be a slit or ridge along the middle part of the splint for
holding rail pieces.) This has several valuable possibilities:
If
the transition area (and its transition bracket) is several meters
long, new possibilities open up:
The
transition bracket can have a door in its upper, horizontal part.
When this is opened, bogies (trucks) can be lifted out, and we have
a service platform.
An
extra wide transition bracket can hold two beams side by side, so
the transition area can hold a switch: One beam in and two beams
out, or vice versa. A short version of this bracket can be
used if the end of the incoming beam can be pushed sideways to align
with either outgoing beam. This will enable trains to pass at
high speeds.
The
use of firmly fixed beams gives the whole beamway added strength, so
that it can withstand strong forces, like from an emergency braking
train.
In
City Streets
In
streets without trees, the beam train will normally be able to
take wide, lazy turns by choosing whatever position that suits it:
As
we see here, even a double-tracked train can have a turning radius
which is several times greater than what a bus or tram can get.
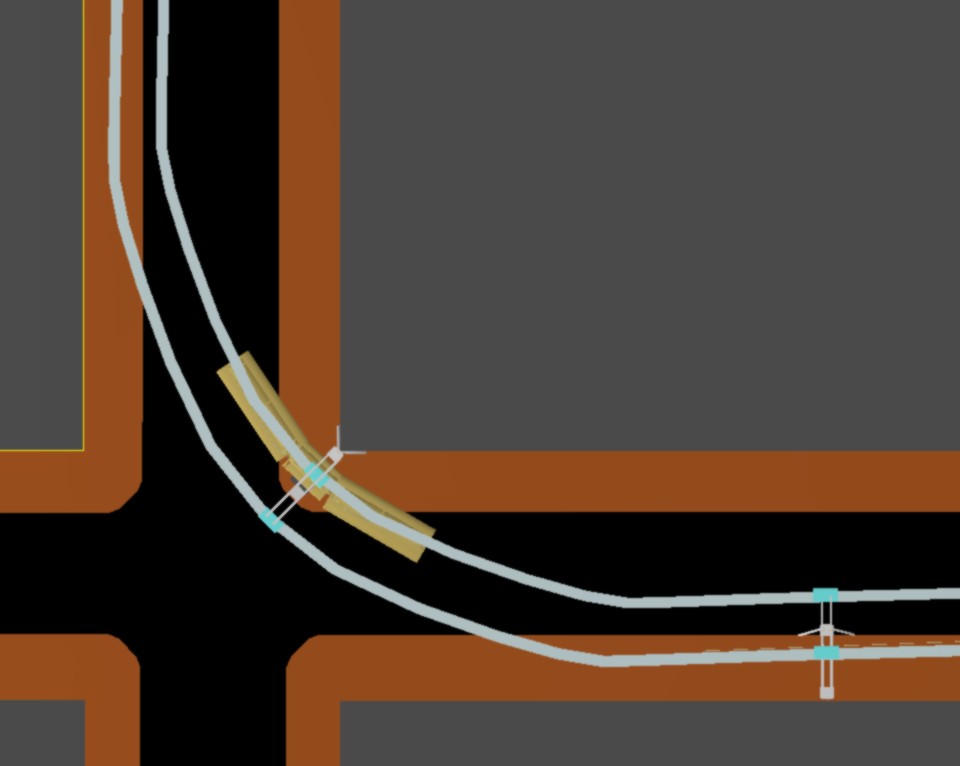
We
can see from this picture that it is natural to have beam section
lengths corresponding to 1/8 of a circle, and the section length will
be (Pi/4=) 78,54 % of the turning radius.
If
we assume a 3 meter track separation, it will be natural to produce
and stock half-beam sections in 3 meter turning radius increments,
and with these values for turning radius (and length): 50 (39.3), 47
(36.9), 44 (34.6), 41 (32.2), 38 (29.8), 35 (27.5), 32 (25.1). The
two last ones seem to be appropriate in this example.
If
we use the same beam type in the two tracks, the length error for a
quarter circle turn will be a quarter of the circumference increase
caused by a 3 meter radius increase: 4.71 m, or 1.57 m in each of the
three beam joins at the turn.
A
long transition bracket is ready to fill in this gap, but may not be
practical to use regularly on street corners, particularly if rail
curvature is to be maintained.
The
two half-beams in a 2C-beam have just 20 % of this separation, so
they can certainly have the same length.
The
ride will be more comfortable if the centrifugal acceleration could
increase and decrease gradually (perhaps following a Gauss curve?).
That means the curvature should be strongest near the middle of
the turn, and gradually weaken further away. Perhaps a
hyperbolic shape would be ideal. It is, however, practical to
use straight beams as close to the turn as possible, and that should
not be so difficult, as the suspension of the beamway train can
absorb quite much sideways irregularity.
It
may not be so difficult to get a near perfect path if the previously
described beam-bending schemes really work. Then the half-beam
parts near the center of the turn can be made more curved, while the
parts further away are made less curved. If this is done in a
balanced manner, the distance between the ends can be kept reasonably
constant.
So:
How small can the turning radius be? Such turn-on-a-dime stunts
are easy for small vehicles with just one or two suspension points,
but we are here concerned with real buses/trams/trains having at
least three suspension points, so now the sideways mobility of the
suspension points becomes the limiting factor. If this is ±
40 cm, the turning radius for our little yellow friend with 8 meter
long wagons will be 8 m, but values less than 20 m are unlikely to be
required in city streets. For the brown train with 24 m long
wagons, the turning radius could be 75 meters, but empty wagons could
be transported through much tighter turns if they for the occasion
were using only two or three suspension points. (The design goal
should be ±80 cm sideways movement.)
The
sight of such a beast above might scare the city dwellers, but
vehicles passing a step beside them should really scare them much
more.
These
two beam-holding tripods (attached to house walls) are actually the
same design, but mounted in two different configurations.
Here
we also see the use of (triptych-style) hinged splints in a turn.
Curved splints would be preferable.
Along Roads
As
beamways can follow roads, the railway and the road needn't give
conflicting influences to the population distribution. The beamway
can in many ways improve its path relative to the corresponding road.
New roads for fast and high-volume traffic are often routed outside
cities, but the beamway can jump over to old roads in order to come
near the city center. Roads will often have to take detours around
e.g. river bends – at least old roads will be found to have
many detours which newer roads would have avoided. The beamway,
however, will take shortcuts over rivers, gardens, parking lots,
garages etc..
In
order to achieve high speed, the beamway will try to straighten out
its path, and frequently cross a road at acute angles.

Such
a beam-holding rack gives high track configuration flexibility.
The
poles should be telescopic. The horizontal part should be
displaceable and perhaps telescopic.

The
use of these racks along a road (compressed lengthwise).
The first
and last two could have been replaced with simple poles, but with the
shown arrangement, it is simple to add a second beam for dual-track
operation.
If the road is altered, the poles of these flexible
racks can easily be moved.
A widened road will probably mean
narrower racks, as one pole in each rack may be placed in a central
double fence.

The
map above shows how a beamway (blue) can position itself in relation
to a new road (red), old road (yellow) and old railway (black). The
rack described above is used in various configurations and position
above and at a road or railway. The terrain may be flat in other
places, too, but agriculture and other land uses will be less
disturbed through this positioning strategy.
Beam
Suspension without Poles
Between
two strong buildings/rocks, some beam splices may be suspended in a
V-shaped wire.
In
difficult terrain, it may not be possible to have a pole every 40
meter along the track. If the beamway follows a road across a bridge,
it should generally not be difficult to let the beam follow the road
at a higher level. If it is a suspension bridge, the construction may
be simpler then normal if the poles can be tied to the vertical
cables. If the road has to make 90 degree turns before and after a
short bridge, the beamway can take shortcuts at the ends, and may be
able to cross at a more convenient angle like 45 degrees. And if this
bridge is high, the beam could hang under it.
If
there is no bridge, the beam could be suspended in the same manner
under cables. In this case the joining of the half-beams should be
staggered: Instead of a double join with splints every 40 meter,
there should be one half-beam join in a lightweight, wire-suspended
bracket every 20-30 meter.
It
should be noted that the beam shown above is hanging under straight
cables, and not under the catenary cable commonly used for
bridges. This is because a train will significantly increase the
bridge weight and deform the catenary cable, bending the beam where
it passes. A road bridge, in contrast, has a quite constant weight,
so its catenary cable will retain the curvature.
If
the beam follows a suspension bridge or hangs under its own cable, it
should be practical with a short distance between the suspension
points. The beam could then be thinner and lighter here, enabling a
valuable weight reduction.
This
should be the preferred design for long, straight tracks. The beam
there should be ready for being moved along its length now and then.
When the beam sags down between its suspensions, it should be moved a
distance equal to half the suspension separation (and beam pieces
equal to this distance should be moved from the front to the rear of
this movement). The beam will now be held up at the sagging curve,
and further sagging will straighten out the beam. This applies to
beams held by poles, too, but the suspension separations should be
uniform.

Such
an A-rack can adapt to uneven terrain by having its crossbar in
various positions, and by varying its leg lengths.
The lowest
position shown allows normal elevator use. The higher positions allow
emergency evacuation – with an unsupported elevator hanging
under long cables.
The distance between these A-racks can be at
least twice as long as between normal poles.
With beams in the
lower position, support of the intermediate beam part can be from
cable suspension as shown in the previous picture.
With beams in
the higher positions, the support can be from simple poles (standing
freely upon the ground, giving only vertical force). Or the A-rack
can be extended by a simple cable-holding pole on the top.

The
beamway can get a stiff and long beam by using an I-beam or truss
like this.
The 2C-beam hanging below it can be much thinner and
lighter (and asymmetrical) now when it needn't function as a beam.
If
the beamway follows a road tunnel, the beam should be embedded in the
tunnel ceiling, or it will be in the way for high trucks. It may be
feasible to affix it in a groove in the rock, or it may be necessary
to set up large holding brackets which follow the profile of the
tunnel. A vehicle with the same shape (minimally obstructing
the traffic) could be used for cutting the groove in the tunnel
ceiling, and for mounting the beam.
The
train itself would not be in the way, as it would act like just
another bus. In such a case it may be wise to let the poles just
outside the tunnel stand in mobile racks, so that the whole beamway
can be moved to the side if it gets its own tunnel. A tunnel
for a beamway will be just a simple little hole (< 4 m Ø).
If it is placed near the main tunnel, it can double as an
escape tunnel.
Movable
Beams
A
simple trick with movable beams is: Make a track switch by pulling
one end of the beam so much sideways that this end is aligned with
another, adjacent track. That should be about 80 cm to the
side, so such a switch can be passed at a quite high speed. If
the two half-beams can slide in relation to each other, the problem
with track length variation at the gap will become quite small.
Anyway, some transition track telescoping, involving obliquely
cut tracks, may be useful. It will be difficult to fix the
movable beam end properly with splints. It could be fixed with
half-splints to a pole whose top can be shifted sideways, or the
movable beam could simply be made a little shorter.
A
more drastic beam movement is: Get the beam out of the way for
crossing ships. A beam is a far simpler object to swing away
than a road or railway track.
Here
are two designs for bridges that can be opened.

And
here are two more – for small rotating bridges.
The
rotating bridges could, if made large and strong enough to turn while
carrying a train, be used for turning a train at the end of the
track, or for sending a train/wagon into one of several parking
tracks.
And
now a more impressive trick:
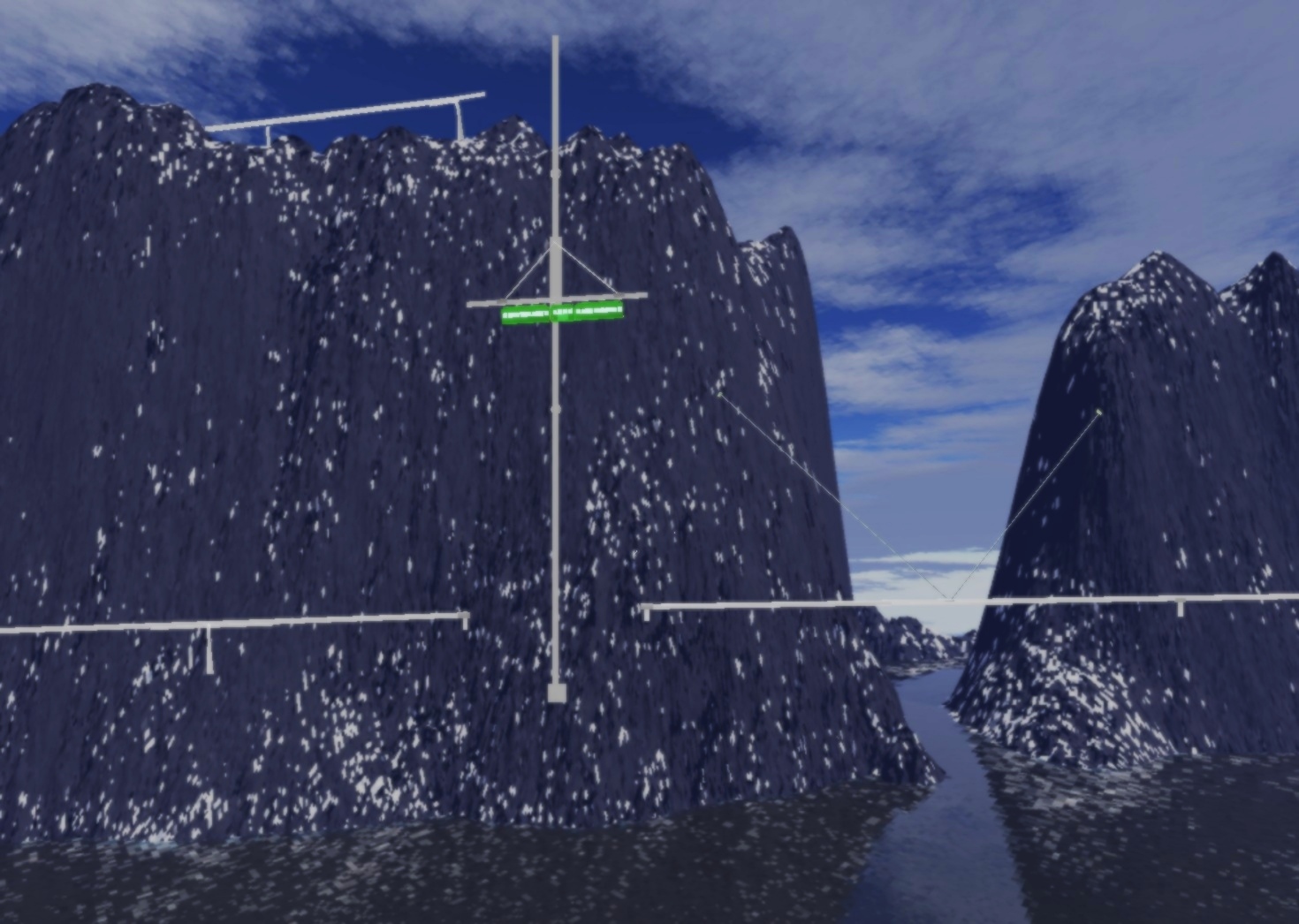
The
train takes the elevator up to the mountain plateau
In
this picture we can also see:
The
beam hangs under brackets which are attached to the vertical cliff,
and it hangs in a V-shaped wire when jumping from one mountain to the
other.
The
elevator could easily be designed to rotate to align with any one of
several receiving tracks.
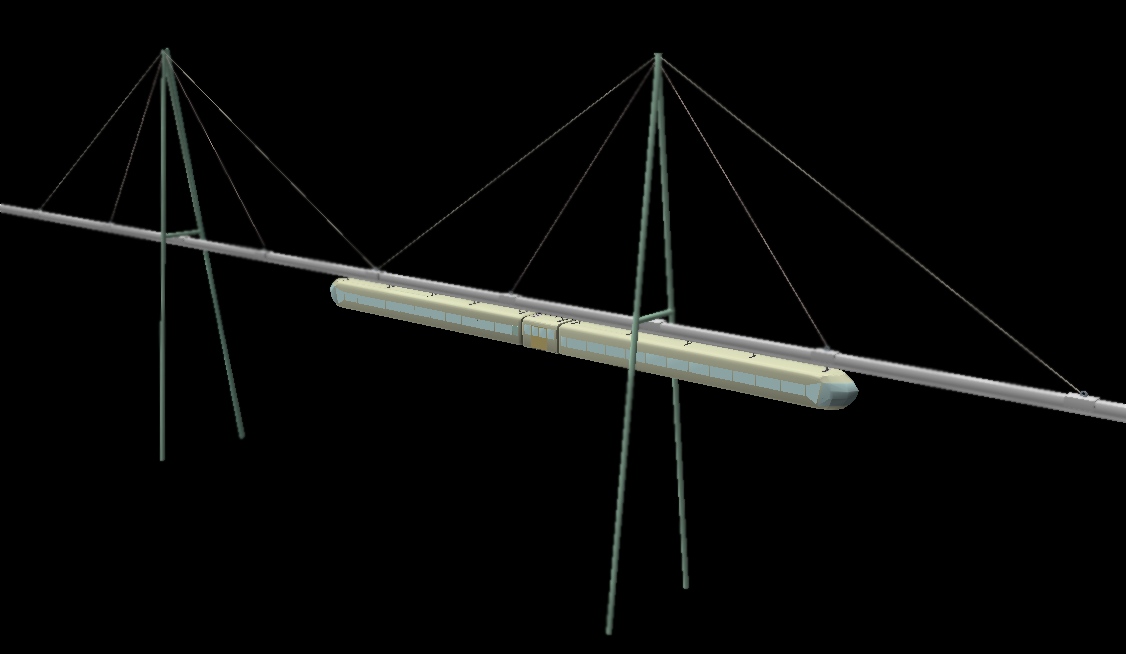
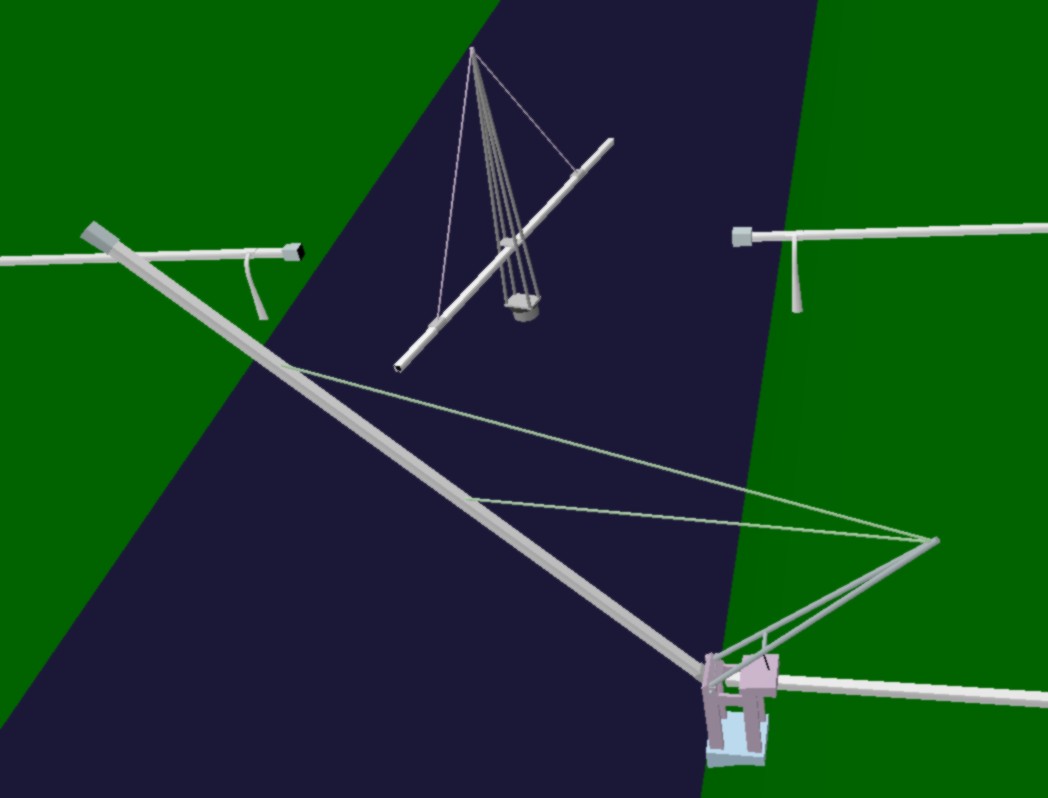
The
ultimate use of a movable beam would be: Mount a pole on each of two
ground train wagons, going side by side on two parallel tracks, so
that the beam between them can sweep over a farming field. If the two
poles are tall towers, each with wires from its top and down (on both
sides) to adjacent parts of the beam, they could hold a beam which is
more than 100 meters long. An unmanned train on this beam can cover
the entire area and automatically harvest food or energy crops in
also difficult environment – from deep water to steep hills,
and also over trees. When the beam is in the middle of the field, it
should line up with a beamway line through which trains can go
out and deliver the crops at remote destinations. The low tracks may
be somewhat elevated (or fenced in), and then automated machinery may
not interfere with most animal life. People may find paths in this
terrain ok for walks. The low tracks could be very steep, with
pulling wires like a funicular. If the earth is not to be worked
with, the machinery needn't go on the ground – just up on the
beams – so the whole process can easily be automatized. The
lower parts of the plants may be left untouched. This means that
Coppicing for
energy harvesting may be replaced with pollarding
over a relatively undisturbed animal life. Chopping the wood to
pellets may be done during harvesting. Very steep or uneven terrain,
useless for conventional agriculture, may be used. More details here.
Crossing
Water
The
light beamway is well suited for crossing water, with the beam being
carried by pontoons. If the half-beams are staggered at the crossing,
the beamway line will constitute a quite solid long beam. There will
be a range of designs to choose from, depending upon the size (and
number) of boats that have to cross underneath:
No
boats: The poles on the pontoons can be very short.
Only
small boats: The poles are like those used on land – for
lifting the beamway over normal land traffic/activities.
Larger
boats: Special wide pontoon configurations may be used (for towers
or tall poles) in the parts of the crossing where large boats may
pass. If there is deep water near one shore, it may be convenient to
locate this passage here, as it is easier to build a tall pole/tower
on land – especially if the shore is elevated.
Ships
and tall sailboats: For light ship traffic, a beam that can be
lifted out of the way (as depicted above) may be used, but a
pontoon-carried beamway will probably not have sufficient position
accuracy for such a mechanism. For crossing heavy ship traffic, a
submerged floating
tunnel should
be used.
The height
available for the boats can be either: below the beam, or below the
bottom of the train. Letting masts – and perhaps other, more
dangerous parts of boats – pass in collision course with
trains, might be feasible if boats tall enough to collide were only
those piloted by professionals who could be expected to observe train
schedules. The only safe precaution may be to block the crossing path
with wires at train bottom height, although parts of this blockage
could be booms that are lifted when no train is near.
The water
surface area of the pontoons should be so large that they don't sink
much while they are carrying a train. The stiffness of a
staggered-spliced beam should ensure a good weight distribution over
many pontoons. Large and slow waves may cause a danger of metal
fatigue in the beam, and therefore necessitate rigid anchoring in
exposed waters. The tidal movement should not be problematic if beams
crossing the shores are mounted with articulation – prepared
for some bending in joins. The last pole on the shore may have to
stand on a little bridge having one end on land and one end on a
pontoon – for halving the tidal amplitude there, ensuring a
small enough vertical slope change. Or a long span will be needed: A
one meter tide change at the end of a 57 meter long span will give a
one degree slope change – the limit
for long trains.
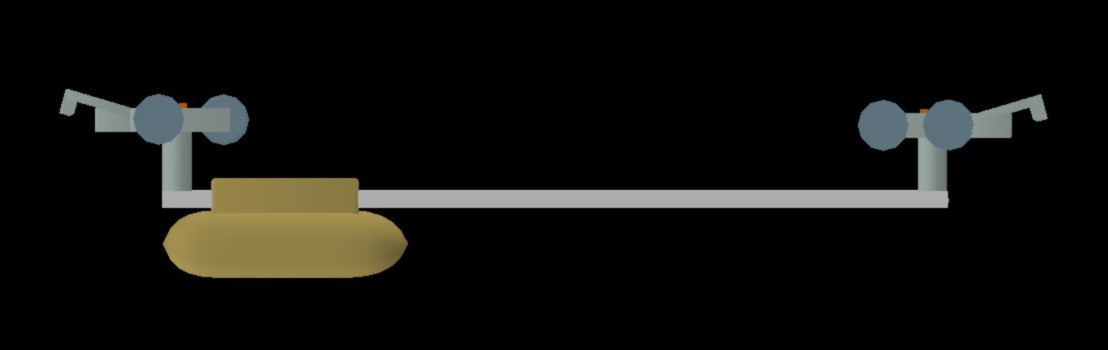
For crossing
long distances (and/or for moderate train traffic), the beamway train
could use a ferry having on its deck a beam which (at either end) is
connected to a beamway line when the ferry is moored:
A catamaran
ferry for short trains. The receiving beam has a movable end –
for obtaining connection with the ferry's beam.
Also electrical
connection is obtained, so that the ferry can run on rechargeable
batteries.
For still
higher flexibility, a cabin could be lowered upon a ferry/barge, but
this would necessitate another train ready to receive the cabin after
the crossing.
The
Submerged Floating Tunnel
A round steel
tube, 3-4 meters in diameter, should be a suitable tunnel for the
beamway. Ventilation and illumination should be unnecessary. The
light weight and quite derail-proof traction of beamway trains will
make such tunnels far simpler and safer than what conventional trains
require.
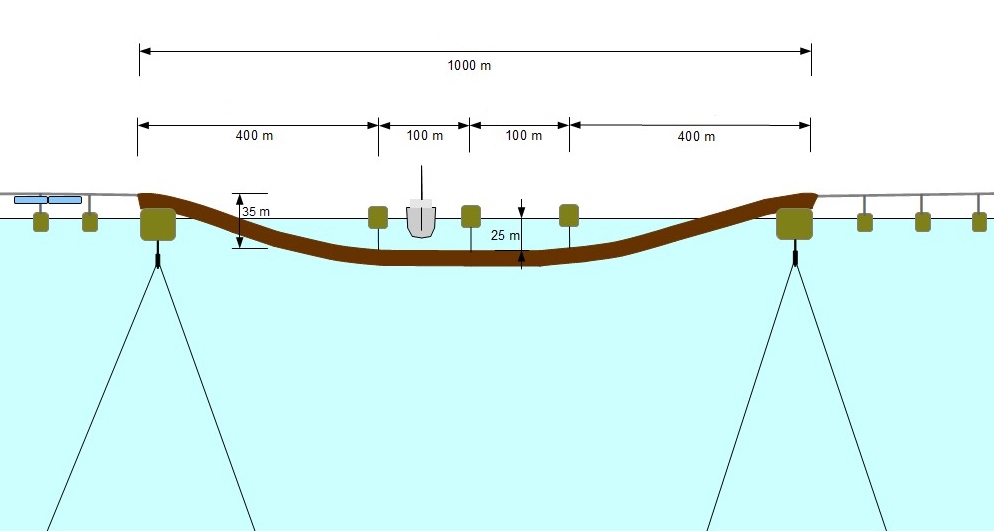
A
simple submerged floating tunnel. (Without reinforcing structures,
and without supplementary pontoons at the sloping tube)
It
can be towed out from a shipbuilding yard.
(Vertical
dimensions are exaggerated in this picture; the tube diameter will be
less than 4 meters. The anchor wires/rods should actually be spread
in the image depth dimension.)
The
tunnel consists of three parts (and soft
transitions between them):
Sloping
down from one shore
Horizontal
in the middle
Sloping up
to the other shore
The sloping
parts will hang under pontoons having a quite small separation. Small
boats should be able to pass over these parts. The slope might be as
for undersea tunnels (10% in Norway).
The middle
(horizontal) part should be 20-25 meters below the surface to allow
passage for ships. It would be advantageous if pontoons could be used
in only three places: In the middle (to separate the two sailing
directions) and at the transitions to the sloping parts (to indicate
the sailing channel limits for ships). Under the middle (and slightly
lower) part of the tube there might be a reservoir for collecting any
leakage water. It should have a water level detector and a bilge
pump. This reservoir could be shaped like a V-shaped keel, which
could reinforce the tube. (But, as the bottom of the tube isn't used
by the train, it is ok if any water forms a long pond there. The
bottom part is also needed for passing creatures – on two or
four legs – straying in there: Topple them over and run over
them.)
An important
design consideration is: The tunnel tube should be designed to not
collapse if it accidentally became filled with water, even though a
water-filled interior will dramatically increase the weight. It will
be easiest to design a tunnel strong enough for both situations if
the upwards forces from an empty tunnel were as strong as the
downwards forces from a filled tunnel. The tendency for the empty
tunnel to float up should not be attempted neutralized by means of
weights attached to it, as this would make a water filled tunnel too
heavy, but by means of anchoring wires to the bottom. (Anchoring
stiff rods, if possible – for holding up a filled tunnel.) And
the pontoons should be heavy (and attached with stiff rods) to
counteract the buoyancy.
This strong
tube enables heavy trains to pass there. (It is easy to attach the
beam very firmly, and of course with short intervals, inside the
tube.) Trains in the tube are consequently well suited for
transporting cars safely under the water.
For increasing
the stiffness of the tunnel, a T-shaped steel profile could be welded
to the top of the tube (where it would also protect against ships and
perhaps bombs dropped from above, but necessitate a larger tunnel
depth). And/or a similar inverted profile could be welded to the
bottom. The vertical part of this profile should have large holes –
for reducing the drag from cross currents.
The trains to
be used in the submerged floating tunnel should preferably have
backup batteries (for leaving the tunnel in case of a power loss),
and they should have rubber wheels pinching the beam from above and
below (see picture in The Trains
below). This will enable trains to pull themselves out of a
tilted/flooded tunnel. (If wagons float up, ordinary top wheels will
loose traction.) Another alternative is that a locomotive with such
double traction is stationed at each end of the tunnel – for
automatized rescue operations.
Both cars and
conventional trains would be helpless in such a situation.
The
Wheels
Conventional
trains use wheel flanges for ensuring precise tracking. Even if
rubber wheels are used, it may be necessary to use such
metal-against-metal contact if extra strong forces become required
for tracking. The picture below show three ways to do this:
The
conventional single flange
The
sides of a hard wheel provide flange forces
Like
the previous, but a rubber tire is located between the steel sides.
The rubber (with or without air) is protected by the steel, and the
wheel can roll on its steel if the rubber is torn off. (The wheel
shown in The
Beam
above
uses the same principle.)
An
important function of rubber is: To prevent the huge forces caused by
a metal object lying in the track. It will be advantageous to have
springing action in the zone between the hub motor and the rubber
rim, mainly as an extra insurance against such dangerous jolts.
Another
method to ensure good tracking for rubber wheels: Let each bogie
have horizontal wheels running against the side walls.
But the simplest tracking method for rubber wheels will
probably be to let them have steel walls.
 Outsiders:
alternative beam-wheel combinations:
Outsiders:
alternative beam-wheel combinations:
Left: A flanged wheel in a
grooved beam. (Unlikely to be chosen, as it just follows an old
tradition.)
Middle: A beam for flangeless wheels, with a steel
wheel normally following the weak tracking force from the wheel path
curvature. Could have a zone of vibration-dampening rubber or plastic
inside the outer steel rim.
Right: A rubber wheel runs better in
this grooveless beam.
The
right part of the picture shows a cross section of a special rubber
wheel designed for this beamway. This wheel has two circular steel
plates which can take the strong guiding forces from the side walls
of the beam. These plates also function as a steel wheel if the tire
is destroyed or just looses air pressure. When the outer wheel plate
is removed, it is easy to change tire. There are only tiny holes
between the tire cavity and the remaining space between the wheel
plates. This means that the short-term springing action of the tire
has the progressive characteristic determined by the small tire
volume, and still has its average tire pressure evened out by the
larger adjacent volume.
These
rubber wheels should automatically be kept fully inflated by an air
pump which is supplemented by a safety valve limiting the pressure in
each tire. This air pump could have a very low capacity, and could
be:
a
vibration-driven mechanism at the wheel's safety valve
a
continuous pumping action from e.g. the bearings on the axle. If the
thin duct shown going through the axle (in the right part of the
picture above) has its other end in an opening over which the
cylindrical rollers of the axle bearing roll, a valve here could be
enough for giving sufficient pumping action.
a
tiny piezoelectric or electromagnetic pump driven by a piezoelectric
or electromagnetic accelerometer-like sensor/generator elsewhere on
the wheel pair
a
similar pump driven from the power line if the bogie has brush
connection
The
optimal tire pressure may depend on the speed. This could be
controlled by a microprocessor on the bogie, or by a simple valve in
the entrance to the tire cavity, if this valve is controlled by the
centrifugal force.
It
may be useful to have a microphone on the bogie – for detecting
unpressurized tires. This might work best with a microprocessor on
the bogie.
The
rubber wheels on such a smooth surface can do with very little air –
just so much that there is a thin air layer in the lower part when
the train is standing still. This small air layer will prevent
the rubber from being deformed. When so little air is used,
getting a flat will not be so serious. A good, elastic material
which does not deform permanently, could do without air altogether.
A
rubber wheel must be quite wide, but only in the outer part. The
inner part – without rubber – can be quite thin. Car
wheels are shaped this way, having the brake mechanism in the space
made available at the thin part of the wheel. This place is well
suited for mechanisms involving the interaction between rotating and
non-rotating parts. This could mean motors instead of brakes, and as
motors can do regenerative braking (supplemented by beam-pinching
emergency brakes, as depicted below), the beamway should use this
opportunity to get a motor in each wheel. This will ensure good
hill-climbing capability, but perhaps not give enough total power for
high speed, so additional locomotive power might be needed.
The
alternative beam profile presented here has some noteworthy
properties:
It
is thin in the middle. The middle contributes little to maintaining
the straightness of the beam, but needs some thickness to prevent
the twisting which makes the C-profile open up midways between the
poles. The thinness also makes it easier to affix the beam by
drilling holes. The curved shape of the inner wall gives more room
for screw heads and other retaining objects.
It
should be valuable to have thickness in the inner part of the beam –
at the ends of the C. If the rigidity of the inner and outer part of
the beams are balanced, there will be less of the C-opening
twisting.
Air-filled
tires like this are not very reliable, and could be avoided if air
cushion hovering is used for carrying most of the train weight, thus
decreasing the forces on the wheels. See A
Compromise Bogie below.
The
Trains
A
conventional train rides upon its bogies (trucks); a beam train hangs
under it. The beam train bogie is essentially a mini-version of
the old heavy-train bogie. If the bogies are motorized, they may be
regarded as small locomotives – microlocs.
The
conventional train has traditionally consisted of a locomotive
pulling some unpowered wagons, but modern passenger trains tend to
have the locomotive functions (electric motors) integrated in the
passenger wagons. This is like a laptop computer: elegant and
convenient when everything works well, but awkward when a problematic
part needs to be replaced. A wagon or train full of passengers is ill
suited for motor replacement.
The
beamway train can and should be designed to combine the advantages of
both approaches.

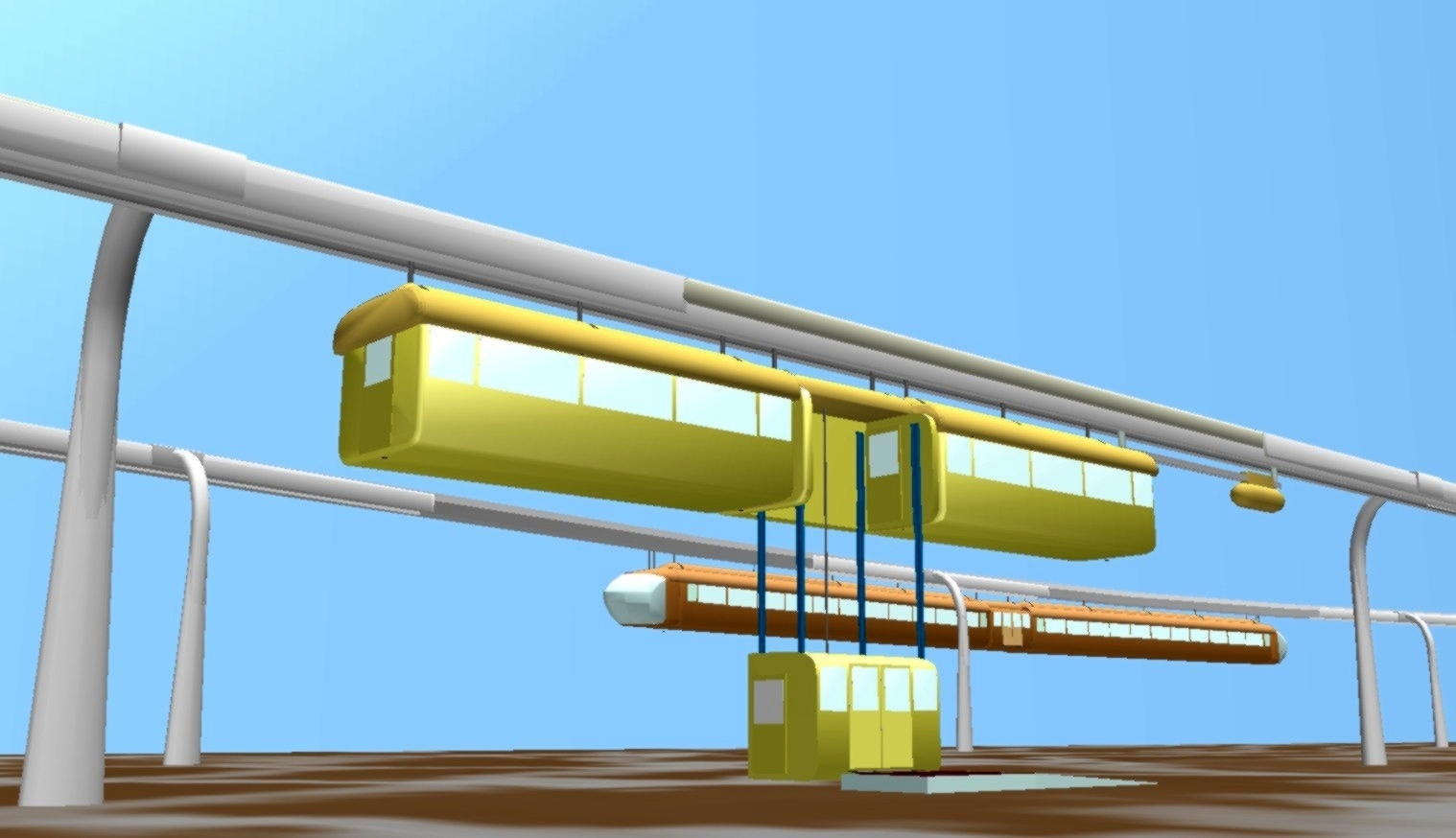
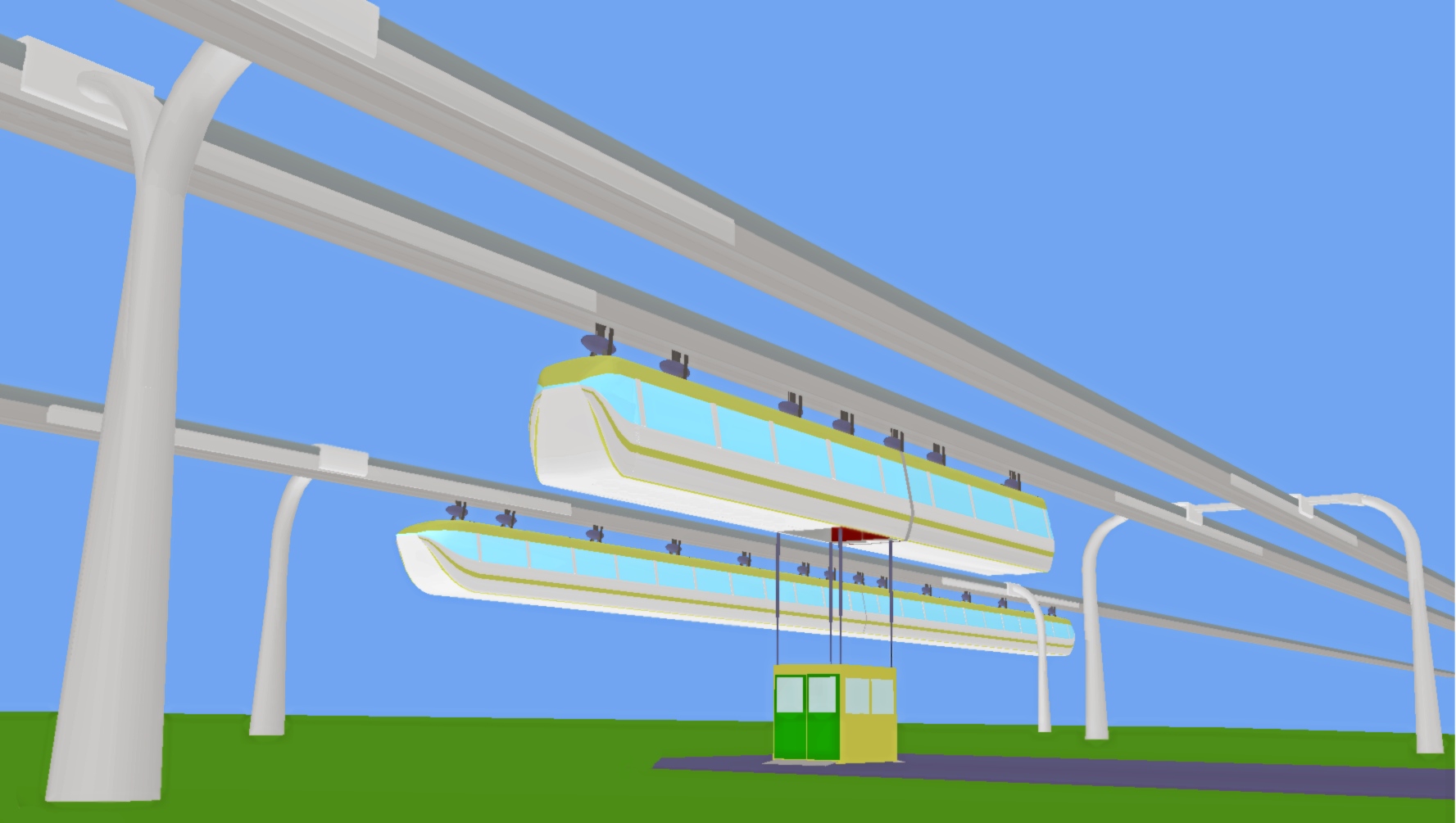
The
elements making up a small beamway train/tram/bus.
(Shapes are not
shown in this diagrammatical representation.)
A
beamway train should have one or two wagons. An elevator should be in
the end of the first wagon, or constitute a separate "wagon"
employed between the two real wagons. The wagons hang under a series
of "microlocs" – small locomotives handling both the
suspension and propulsion. These have traditionally consisted of
motorized bogies running inside a hollow beam, but we will mainly use
air cushions for holding up the train, and then it will be more
appropriate to speak about sleds instead of bogies.
From
each sled goes a suspension connection (controlling the height and
providing a soft suspension) down to the wagon. The wagon only needs
to have the small motors which displace the suspension sideways.
Microlocs
might be programmed or remotely controlled for running alone, but
will normally work in teams, and usually for carrying a train as
depicted above. Alternatively, a team of something like 3-10
microlocs may be connected to a very thin "wagon" which is
hardly more than a beam. When this is connected to an end of a train
– perhaps the nearest suspension – we have something like
a conventional locomotive. Such a miniloc, used before and/or after a
train or wagon, can be useful for giving a train some extra pulling
power.
Beamways
may run on different kinds of beams. We are concentrating on the
2C-beam, but the train shouldn't be concerned with what kind of beam
it is running under. Different kinds of beams will require different
kinds of microlocs, but the lower part of the microlocs – the
suspension rods and their connection to the wagon top – should
be standardized, so that the same wagons may be used with different
beam types.
Braking
is primarily done by letting motors work as generators (regenerative
braking), but for strong emergency braking, friction brakes are
essential. These conventionally act through the wheels, but beam
trains can do it much better:

Here
we see the brake pads of the beam train.
They brake much more
efficiently by pinching the beam.
And the beam carries the heat
away rapidly.
If
motors on the bogies turn out to be too weak, too heavy, or causing
too much air resistance in that narrow beam, a miniloc like the one
depicted below may be useful
A
large motor should be placed in a nacelle, resembling a bomb or
torpedo when it hangs under the beam. It could then function as
a locomotive which can run by itself to another train which needs to
be pushed or pulled.
Meet
the free-lance locomotive: It has a lance, perhaps 10 meters long.
This is a beam containing a motor shaft, and the mechanical
power is transferred to the bogies in both ends, as well as to the
connected bogie of a preceding or following train, through
either end seen in this picture. If the motor is displaced (along its
beam) to the remotest position, the weight distribution of the train
is improved.
When
the middle wagon of the train pulls the two adjacent wagons at floor
level, more of the train's weight comes on the first and last bogie.
This not only improves the weight distribution, but also
improves the traction.
A
separate loc may be used at the same time as small motors in the
wheels. The loc may be needed for high speeds. A heavy loc is
valuable for providing high pulling force. But if the problem is to
achieve high speeds, high power can be delivered while using low
force, and then a light loc can be efficient.
The
free-lance locomotive will run by itself to help another train, if
needed. A bag with a few hundred kilograms of luggage could
also be hung under it.
The Elevator
Having
an elevator in the train dispenses with the need for elevated station
buildings at the stations – which would need to have elevators.
Station buildings with elevator could easily become so complex that
they would have to be staffed. Being able to do without station
buildings, saves costs and prevents cluttering of the urban and rural
environments, and it gives valuable flexibility, enabling the stops –
and even the beamway lines – to be relocated. Station buildings
cannot replace elevators, as elevators are valuable for emergency
evacuations.
The
elevator should be in the middle of the train, easily accessible for
passengers from fore and aft. If full reconfiguration flexibility is
needed, the elevator can have its own wagon, so that both the fore
and aft wagon can be replaced (and dispatched to side lines)
separately. A separate elevator wagon is also valuable for a minimum
configuration, when a few passengers control the train movement by
pressing buttons for selecting the destination. That is: The train is
controlled like an ordinary house elevator.
But
most trains will not need to send away the front wagon, so the
elevator should generally be built into the rear end of the front
(main) wagon.
Whether
or not the elevator has its own wagon, it could be produced as a
module, with the roof from which it all hangs. This roof could then
(in a service facility) be inserted from back into a long, short or
minimal (elevator) wagon.
The
elevator to the left hangs in a single cable and is stabilized by
four telescopic rails. If there were a cable in each rail, as shown
to the right, very long cables could be used for evacuations at
difficult places – e.g. when the train is 20 meters above the
ground. The separated telescopic rails would then become reassembled
when the elevator goes up again. (The lowest rail set – the
outer tubes – would be four vertical cable channels in the
elevator walls. The other tubes should all be hanging together from
the roof, with decreasing diameter downwards.)
The
elevator should be able to eject a little ramp from under its front
door, as shown to the right, so that wheelchairs can be admitted from
flat ground. (The external ramp depicted to the left can be regarded
as a station area marker/placeholder.) The bottom of the elevator
could also have a foot contacting the ground for stopping penduling.
If side doors are not used in the elevators (as in the picture to the
right), any remaining penduling will not be a threat for the
passengers.
The
stationary wall behind the elevator compartment should contain the
elevator motor(s), as well as backup batteries ensuring evacuation
capability.
The
picture shows how the elevator ends have doors leading to fore and
aft wagon. These doors should be as wide as possible, so that both
bikes and wheelchairs could be rolled to parking positions in the
wagon, beside the aisle. If there are windows in these doors, the
train's conductor (seated at the elevator's back wall) has a good
view around, being able to see passengers approaching – both in
high and low elevator position. (S)he may then choose to start the
train when the elevator starts going up.
The
Electric Motor
The
electric motor consists of two sets of magnets, one fixed set (the
stator) and one moving set (the rotor). At least one set must
have electromagnets – able to adjust the direction and
magnitude of its magnetism in such a way that the desired force is
obtained. The other set may be permanent magnets,
electromagnets, unpowered coils magnetized inductively, or a
ferromagnetic material. A practical and efficient motor design
is: Use a brushless design – with permanent magnets in the
rotor and intelligently controlled electromagnets in the stator. The
strategy for powering a stator electromagnet is:
To
use the motor as a generator: Don't apply voltage to the
electromagnet, but connect a load to it in order to harvest induced
voltage. (This is essentially the same as regenerative
braking, except that the harvested power is the controlling
consideration rather than the amount of braking.)
This
analytical approach may seem artificial, but we really should be
using computers (microprocessors) for controlling those quite
powerful motors, and the above algorithm will determine the
programming. The commutator used in traditional motors is
simply a "computer" for computing the magnetizing current
(positive, negative or off) as a function of the rotor position.
Being a mechanical switch, it is bad for efficiency. A
computer, however, can use smarter strategies like providing
magnetizing current pulses whose duration is determined by the motor
power needed, and correct for power line voltage fluctuations.
So
– what kind of voltage should we have on the power line? The
natural point of origin will be the 50 or 60 Hz AC available
practically everywhere, and we can have it transformed to whatever
voltage suits our trains. A single power line (using the beam
as the return path) will have an inconveniently low voltage for a
significant time – around the time when the sinusoidal voltage
curve crosses the zero line. (The polarity of the voltage is
unimportant – the electronics can easily reverse the polarity.)
Electronic equipment can generally remove these voltage lows by
means of filter capacitors, but these will be impractical in
high-power applications like trains. If we use a three phase
supply, we will have a decent voltage all the time, but will need two
power lines in the beam. If we, however, full wave rectify the
three phase power, we have a quite well stabilized DC – with
only 4.2% ripple (AC component). The computer can now get a
good voltage anytime. It just sends the current through the
electromagnet in the opposite direction if it needs to reverse the
magnetism.
The
problem with using DC is: When you rectify AC to DC, you need to know
which voltage you will eventually be using. With AC, you can
easily use transformers later. With a well-defined application
field like train motors, there can't be much uncertainty, but it may
be wise to specify a reasonable wide voltage range the trains must be
ready to deal with. The small amount of AC needed by various
equipment in the trains, can easily be made by chopping up the DC.
Another
advantage with DC is: It is easier for the motors to send the power
back to the power line during regenerative braking when they needn't
check which voltage the line is ready to deal with at the moment.
(But if there is only one train supplied by a line rectifier,
that rectifier station must deal with this problem when the train
brakes regeneratively.) DC also doesn't pollute the environment with
biohazardous electromagnetic fields the way AC does.
Power
will be supplied to the line from many sources – including
regeneratively braking trains. All this power should be pooled
together, so that if there is a break along the line, power will
still come from the opposite direction.
Hovering
Trains
For
high-speed trains, it may be advantageous to avoid wheel-rail contact
altogether. A new technology called maglev
(from
Magnetic Levitation) is being developed, and even used on some short
stretches. It uses electromagnetic forces to lift the train off
the ground, so wheels, which are quite impractical at high speeds,
are dispensed with. Maglev needs a quite special track which is
incompatible with ordinary railway tracks, and this is a serious
impediment for its acceptance. For the beamway, however, maglev
operation may be compatible with our half-beam design, because:
Stability
is easier to achieve when the train is hanging under the suspension
mechanism. This is important when there is no stabilizing
friction.
Further
stabilization (for counteracting strong side wind gusts) can be
obtained by reversing the magnetism on the side threatened by
becoming lifted.
But
the problem with maglev is: Its track must everywhere be able
to exert a lifting magnetic force. That means: It will be
expensive and bulky. The strength to weight ratio is critical
for the beamway, so it can't afford to be weighted down by additional
paraphernalia all the way along. An extra light (and cheap)
maglev track design has been introduced quite recently: Inductrack,
whose magnets are simply unpowered coils in the track. They
become powered and magnetic by induction due to the magnetic field
from the moving train. The faster the train goes, the more
efficient is the levitating mechanism. This mechanism is really
efficient: It can keep the train lifted, down to walking speeds.
This has an interesting consequence for us: If we are
content with using levitation only at higher speeds, the array of
induction coils can be much lighter (and cheaper).
This
starts looking like another kind of levitation: windsurfing.

Bogie
with airfoils for windsurfing
If
the train can catch the air in the beam, and press it down towards
the rails by means of suitably curved airfoils, it can slide on a
cushion of air – provided it can close well to the sides. One
advantage of this windsurfing is the progressive spring action: The
pressure from the trapped air increases strongly if the surfboard –
shaped like the bottom of the beam interior – comes too low.
This holds also for displacement to the sides, so the stability
will be good, but this depends on how easily the air can move
sideways under the airfoil. If the air is compressed to half
its volume over a 40 cm wide bottom, the 1 kg/cm² lift becomes
4000 kg for each meter of the beam, so only a fraction of the train
will need this lifting surface. If the geometry of the lifting
airfoils is fixed, the lift-drag ratio can probably not be good over
a large speed range, so wheels may have to be used up to the speed
where they start getting problems. But those wheels can't be
small, so they will disturb the aerodynamics. The bridging
solution here may be to use small wheels in conjunction with either a
variable airfoil geometry or Hovercraft-like compressed air cushion
flight. But variable airfoil geometry doesn't simply mean: Put a
hinge on the place where the airfoil starts rising. This is because
the airfoils are also curved sideways to fit along the lower part of
the C-shaped half-beam, and to provide stabilizing sideways
pressures.
If
the transition between rolling and flying occurs at a high speed,
there will be a problem during slowdown, when wheels which don't
rotate, suddenly and brutally come in contact with the track. It
will be difficult to make all the wheels rotate with a reasonable
speed before touchdown. Rubber wheels should be better than
steel wheels because:
The
simplest solution anyway will be to let touchdown occur at a low
speed.
Even
if levitation can work at all speeds, some kind of bogie set will be
needed in the beam for holding up the train when it is parked or
powerless, and it might as well have some small wheels for low
speeds. The question is now: At what speed should the wheels be
lifted from the track? And should some sort of intermediate
levitation mechanism be used before high-speed levitation is
employed? A maglev solution for moderate speeds could be
electromagnets which pull the steel beam from below, but this may not
be very energy efficient, due to power loss caused by induced eddy
currents in the steel.
Those
two levitation methods may very well be combined – as long as
the extra equipment doesn't become too heavy.
It
may be a good idea to do the levitation only partially, e.g. by
letting windsurfing airfoils relieve the wheels of only half the
weight. But the sideways acting airfoils can still have full
stabilizing effect, so that the wheels may not be subjected to any
forces from the sides. The reduced strain on the wheels should enable
significantly higher speeds. The reduced high-speed traction should
not be a problem, as hill-climbing is unlikely to be required at full
speed. The amount of regenerative braking needed for normal operation
will still be available, and for emergency braking, brake pads can
still efficiently pinch the beam as described under The Train above.
The beamway is unique in its ability to use partial levitation,
because of its immunity against derailing and side slipping. The
partially levitating bogie (possibly supplemented with a little
aerodynamic lift from the train itself) is likely to be the most
important bogie design for all applications except the very highest
speeds.
Compressed
Air Hovering and Propulsion
Another
alternative is the compressor-driven train. The compressor could be
like the (free-lance) locomotive described above, but it need not
exert a pulling force upon the train. Instead, it delivers compressed
air to all the air cushion bogies. In these bogies, the wheels are
replaced by air cushion units - lids covering the channel (with the
track) in the bottom of each half-beam. The front and back ends of
this lid should have valves which could be swung down to almost close
the channel, or swung up to let the air escape – in the
direction from which the train will be pushed by rocket action. If
the closed valve could receive 20% of the total pressure force, the
train could climb grades approaching 20%, or accelerate at .2 g at
low speeds, or reach a top speed for which the drag is 20% of the
train weight. Several air cushion units may be required in each bogie
for obtaining sufficient pulling force.
The
two next pictures show (with a design not made aerodynamic) how the
lower part (“wheel groove”) of a half-beam can be sealed
off quite well by a metal lid on top (shown in blue) and valves fore
and aft (shown in yellow). The valve in the foreground is shown
opened, and the valve in the background is closed. Opening/closing is
done by electric motors or pneumatic actuators (in the violet
cylinder on top of the lid). The thick tube supplies air to the two
or three compartments under the lid.
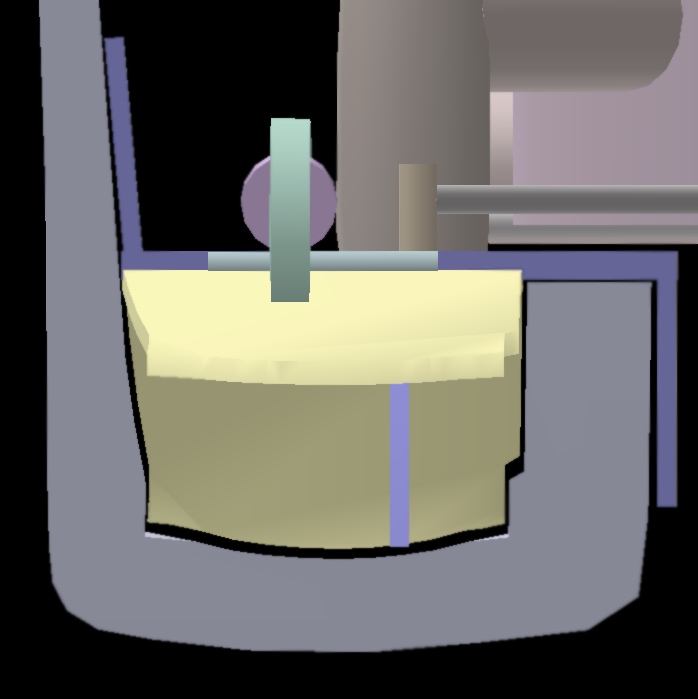
An
air cushion unit of type 1: Thick air cushion (with two compartments)
under the (blue) lid

An
air cushion unit of type 2: Thin air cushion (with three
compartments) under the lid (very thick, blue – partly
concealed by an opened valve)
Type
1 provides simple hovering and position control. The two compartments
provide forces with the directions / and \. The lifting force is the
sum of the two vertical components. This is quite simple to control:
Just keep the airflow strong enough. If it is very strong, there will
be wide openings around the edges of the raised lid. (And unexpected
vertical forces are rare.)
Controlling
the sideways position is not so easy. It can be monitored with
position sensors, and then adjusted by altering the air distribution
to the two compartments. Or windsurfing could be employed against
vertical surfaces, using supplementary vanes.
But
a safer and more elegant method is to utilize the progressive spring
action of an air cushion: If air without an escape route is forced to
compress, it gives a progressively stronger counterforce.
The
type 2 cushion is thin, so that the progressive counterforce comes
before the position error becomes too large (with direct metal
contact). Also this design could use two compartments, but is here
depicted with three, as the added control might be valuable.
The
different compartments give different kinds of force, end these can
be paired in antagonistic pairs: towards left vs. towards right;
rotating clockwise vs. rotating counterclockwise. Airstreams to
antagonistic compartments can be connected with a symmetrical suction
valve so that if an airstream A is reduced to zero while its
antagonist B is strong, the (Venturi) force from B gives suction –
perhaps approaching vacuum – in A, thus augmenting e.g. the
sideways positioning. If a strong wind gust from the right hits the
train, the train should try to resist it in order to prevent an
annoying train swinging. A train with wheels could only stiffen its
suspension until the left wheels almost were lifted. The air cushion
train, however, might increase the lifting pressure on the right side
and turn off the airflow to the left side. With an antagonistic
interconnection, suction would be generated on the left side, to
perhaps double the stabilizing resistance (torque). The train should
have wind pressure sensors on the sides, so that wind swinging can be
anticipated.
Power
loss during flight should rather not lead to a crash, so there should
be some small emergency landing wheels or rollers. The vertical
compartment walls should contain thin steel wheels protruding a few
millimeters, and so should the outer edge of horizontal lid plate.
But such small wheels are only suitable for low speeds, so if power
is lost at high speed, a pressure tank or backup battery should at
least enable some emergency actions like opening the fore valve and
closing the aft valve – for giving a little soaring
(airsurfing) capability. This emergency lift capability could be
increased if each air cushion compartment had a little plasma
generating spark plug for generating extra lifting force from the
local backup batteries. Such a spark-generated force pulse may also
be needed to compensate for unexpected forces, like from a wind gust.
(Or a little fuel may be injected and ignited, so that jet or rocket
propulsion is obtained. But this is possible only to a small extent,
as the beam interior – especially with plastic components –
is likely to be damaged by the heat.)
But
the pressure tank should preferably have so large capacity that it
after a power loss enables hovering during a not too brutal train
slowdown. If the compressor delivers air at e.g. 3 atm in the long
delivery tube, and the average air pressure in the cushions is
(increased by) .5 atm, the air volume expands about six times. A fast
train is likely to have the tube built into the roof (instead of the
cabin lowering mechanism), so by having two parallel tubes, the
capacity is doubled. And/or the compressor loc could have a 300 atm
air tank with a matched compressor stage. Its volume would be about
100 times more efficient compared to the tube.
The
compressor drive is unique with respect to its capacity for storing
energy (in pressure tanks). If a compressor can run at reduced power,
its energy efficiency will be better – because the air will
then be heated less during compression.
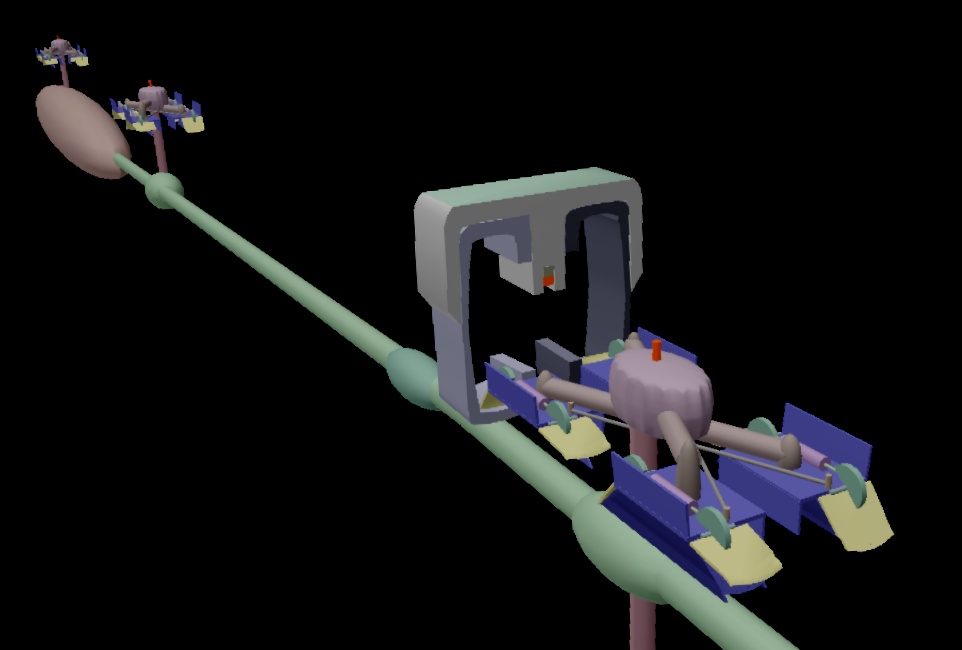
A
compressor “locomotive” (left), and one of the hovering
bogies powered by the high pressure air tube. The compressor hangs
under two such bogies.
(This loc could move by itself, and even
provide some maneuvering train moving even if the air tube is
disconnected. It could have some pneumatically driven, pinching
rubber wheels, engaged in an emergency – for submerged tunnel
use.)
The
proposed bogie shown above consists of four air cushion units mounted
at the ends of the strong X-shaped air distribution tube/beam. Each
arm of the X should have two or three ducts for air to the different
compartments, distributed under control by the bogie's central
processor/regulator.
The
X should have some scissor-like adjustment capability, so these
bogies tolerate some half-beam separating movement. The thin rods
going along the X arms enable opposite air cushion units to be
parallel displaced together – by a parallelogram movement.
This
bogie may be designed so that it could be converted into a wheeled
bogie – for use when there is much hill-climbing and slow
movement. Each air cushion unit will then be replaced by a cylinder
with a sideways-directed axis. This is an air turbine motor. The
wheel fits on the outside of it – like a car wheel outside its
brake. To the free end surface of the cylinder (facing out of the
wheel) could be attached an airfoil unit giving partial lift as well
as sideways stabilization – away from the side walls of the
beam. This breaks the symmetry of the bogie, as the airfoil is
adapted to running in one direction.
Another
kind of wheeled operation: The cylinder contains an electric motor
instead of the air turbine motor. This should give maximum energy
efficiency, but less power and speed. The compressor will be running
on low power, but should then be more efficient due to lower air
heating during compression.
Only
the tops of the four units are common to wheel use and air cushion
use. These tops will ensure correct alignment along the beam for
whatever is attached below them – thanks to the X arm
parallelogram movement. When also wheeled bogies are able to adapt to
varying half-beam separation, the beam need not be designed for
constant half-beam separation, as it will not matter if half-beams
are bent apart when loaded.
The
compressor should be efficient, silent and with low wear, so it is
likely to be of a rotary type – perhaps the scroll
type. The air inlet should not be from an end of the nacelle, but
around the middle part. In this way the compressor, like the depicted
hovering bogies, will be symmetrical, able to run equally well in
both directions, so that a compressor locomotive can be used before
and/or after a train. If the air intake is through a grille in the
middle part of the nacelle, not much debris and birds will be sucked
in. The compression (in atmospheres) should be high for getting low
air resistance loss in the tubes (and for getting much pneumatic
emergency energy stored in the tube), and low for avoiding the energy
loss caused by (nearly adiabatic) compression heating. The
compression should be variable. The compressor might also have a tank
for compressed air – so that additional pneumatic emergency
energy can be stored (for a safe slowdown in case of loss of
electrical power).
The
compressed air from the “locomotive” goes out through the
long horizontal tube (which can flex a little in track turns) and up
to each bogie at or in its (hollow) suspension rod. The compressor
might be something like 20 meters from the train itself. (There could
be an additional compressor loc at the other end of the train,
connected to the other end of the long air tube.) This separation
from the train has important advantages:
the
train weight is distributed over more beams and poles
the
passengers will be more protected in case of a collision
if
a beam or a bogie collapses, the long air tube would function as a
security line
But
passenger evacuation through end doors of the train will now be
impeded.
The
long horizontal tube will actually be two tubes – one on each
side of the center line – and these will be integrated in the
roof of streamlined high-speed train. (These high-speed trains will
not have exchangeable cabins, and the elevator will be integrated in
the rear end of the first wagon.)
The
train may occasionally need some extra pulling power, so it may be
wise to have air outlets some places at the train, on any surface
except the front. These outlets should be covered by flaps going
flush with the train surface, and hinged in the front. When
compressed air is sent out the outlet, it will press the flap open,
which will then provide a surface for the expanding air to push (with
rocket reaction).
Such
flaps opening in the other direction, to catch the wind, could be
used as air brakes, and if the air pressure here became strong enough
to overcome the internal tube pressure, there would be regenerative
braking. Its efficiency would probably not be great, but regenerative
braking would not be so important on long-distance beamway lines.
Each
of a bogie's four air cushion units has a footprint of 20x60 cm,
giving a lift area of 4800 cm² for the whole bogie. If a bogie
is to carry three tons, the pressure in its cushions need only be
3000/4800 = .63 atm. An advantage with using so low pressures is that
(wind gust) forces threatening with lifting one side of the bogie can
be efficiently counteracted by a (local vacuum tank and/or) suction
device providing down towards -1 atm. Normal wheels (running on a
track below them) are unable to pull downwards, but these air cushion
units can pull both downwards and upwards.
This
example, with three tons on one bogie, assumes even weight
distribution. But use of proactive suspension for avoiding loading
the middle part of the beam, implies putting more force at the poles,
more than tripling the air pressure there, to 2 atm or more, but this
is still a moderate value. Low pressures, for suction, should still
be applied also at the middle of the beam, and for this purpose it is
valuable for air cushion units to go down there. (If a sagging beam
has just been turned upside down, the lowest part of the beam will be
at poles, so it is really important for air cushion units to go down
and apply pressure there.)
Intelligent
air flow control enables two beamways to cross in the same plane. It
is easier to reroute air flow when the bogie has to cross a track gap
than it is for wheels to negotiate such a gap. It is also easier to
provide extra lifting force to the bogies which are near a pole –
assuming the train now has a strong spine.
Beam
joints are difficult to make good enough for wheel traffic if the
noise level and wheel wear are to be acceptable. For air cushion
hovering, the gap can be many centimeters, and a simple gasket in the
gap will be fine. It may be wise to skip wheel trains completely for
rural beamway lines – except for steep grades and submerged
floating tunnels, where sqeezing rubber wheels may occasionally be
activated.
No Wheels at
all?
If
it were decided that the trains could dispense with wheels, and use
only air cushion gliding, a completely different, and more efficient
beam design could be used. The problem with wheels is that they are
very large: A train needs a wheel diameter of at least half a meter.
This means they have to be kept vertically like a car's wheels, and
hence be paired, with a stabilizing axle between the two. If the
wheels were running in-line like bike wheels, and tilt to the sides
up to perhaps 45° (like bike wheels), the beam would have to be
very wide and bulky, and hence very inefficient as a load carrier.
But air cushion units can be very small, and able to tilt sideways in
a quite small groove.
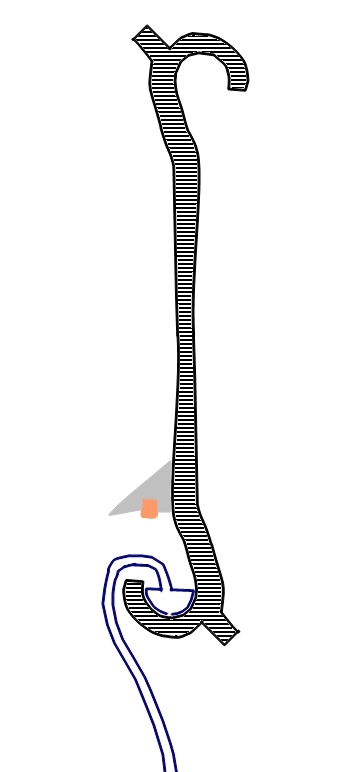
The
S-beam for air cushion gliding – with the air cushion units
running in-line in the bottom of a single-profile beam.
They swing
freely 35-40° to each side when the train swings outwards (banks)
while going through a curve.
Compressed air emerges from slits in
the bottom of the track – and perhaps from slits on the sides,
particularly if control of side forces turns out to be needed. There
may be small steel rollers, lifted by air pressure when not needed,
before and after the air cushion units. These will be useful for
(emergency) maneuvering at speeds up to e.g. 30 km/h.
(The
air-conducting “suspension rod” seems flimsy, but should
be long, e.g. half a meter along the track.)
The train should
also have rising arms which are held in fixed position relative to
the beam. They should contain brushes (small pantographs) for
contacting the power line (depicted orange). And they could exert
anti-swing force (to prevent wind swing) upon either the bottom fin
of the beam or above the power line holding isolator.
The
S-beam will have its steel extending vertically rather than having
the 2C-beam's side-by-side duplication, which gives less
load-carrying strength. A single beam needn't be twice as high, but
rather 40-50% higher. It may be possible to strengthen such a beam
with embedded, diagonally running, carbon fibers, preferably
nanotubes.
It
should be quite easy to shape this beam so that it doesn't bend
(twist) to a side when loaded. And if it bends a little to a side, it
is rather unimportant, as proper space for an axle length is not to
be reserved.
In
tunnels, where the distance between beam suspension points can be
small, only the lower 1/3 of the beam may be needed. (High
stabilizing arms should then be able to disengage and lower
themselves.) The small crossectional area of such a beam makes it
easy to put it into a slit in the ceiling of an old road tunnel, in
which the train can go like a bus. And this narrow plate can have
expansion mechanisms which affixes it in a slit.
If
the train has its own tunnel, a double-track tunnel need be little
wider than a single-track tunnel, as the total width of the two
adjacent beams is very small. Such narrow track parts are called
gauntlets. Trains must be scheduled to meet only outside the
gauntlets.
Special
beams, with track grooves on both sides, may be produced for this
purpose, and for bidirectional traffic on a single line. Beams
hanging in bridge spans will be another application for such gauntlet
track parts.
It
will be simpler to make this beam as a plate with a gutter-like track
channel attached. Such a plate may be made from reinforced concrete.
But it may now be difficult to make the channel contribute to beam
strength rather than being dead weight. Weak splices in the beam are
avoided if the plate and the gutter have their splices at different
places.
If
the beam is a vertical concrete plate, it starts looking like the
“People
Cargo Mover”, but if it is unable to use metal beams held
by metal poles/racks, it may be too heavy and awkward for crossing
awkward terrain. And without an elevator, the safety in emergency
situations is unlikely to be acceptable. This transport concept is
well adapted to high traffic volumes, having a smart mechanism for
lowering the stopping trains/wagons out of the way at stations, but
the concept is less down-scalable and flexible for lower population
densities.
The
S-beam may be vertical all the way, even in turns, as a suspended
train will automatically get the correct banking angle in turns. This
will make such a beamway simpler to build. If a centrifugal
acceleration of .5 g is permitted, the train will swing 30° to
the side. When wind swing and other irregularities are added, there
could be danger of derailing for outward swinging – away from
the beam wall, so an anti-swing mechanism or some other bracket going
to the back of the wall will be needed for derail prevention. The
beam may be mounted non-vertically – for giving a bank angle –
in turns. It will be elegant, but difficult, to twist the beam at
both ends of the turn – for providing beam continuity, but it
should be ok to aim for continuity only down at the track, and accept
sudden angle changes for the wall parts of adjacent beams. The
mechanism for exerting anti-swing force should just be prepared for
discontinuities in the surface it operates on.
A Universal
Bogie
This
chapter shows variation possibilities which may be bewildering. The
preferred design uses a different suspension, as described in A
Compromise Bogie below.
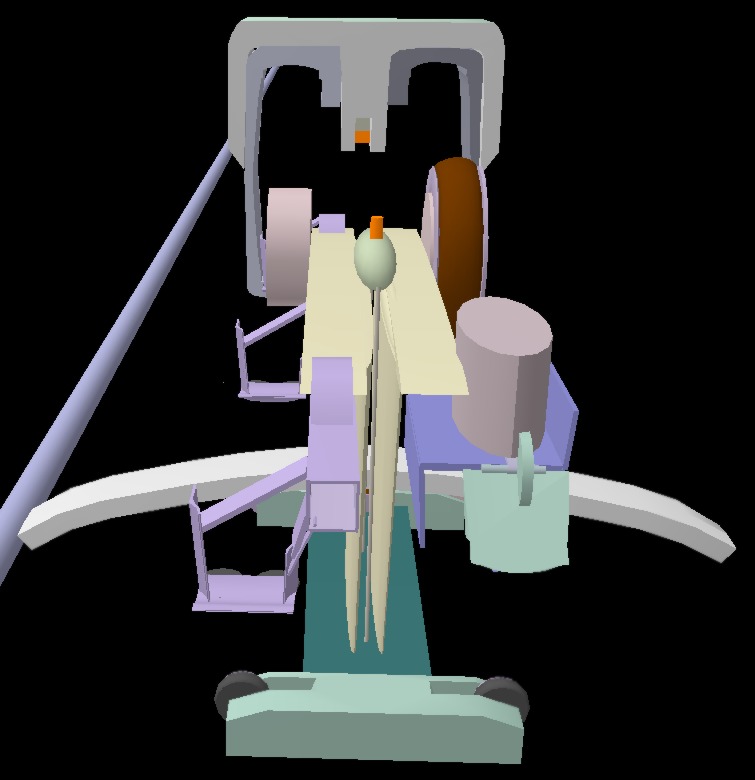
The
high-speed convertible bogie can take four air cushion units or four
wheels containing electric or compressed air motors (with a central
stator).
This picture shows both the bogie (with some modules
attached), its suspensions and parts inside the roof of the
wagon.
The modules attached here – an unrealistic
combination – are:
The right side of the bogie: A wheel with
a motor, and an air cushion unit
The left side: A motor lacking a
wheel, and (violet) a unit for partial levitation (for use with
wheels: full sideways stabilization, and about 50% wheel load
reduction)

The white arc is
one of the two rails along which the suspension can move sideways.
The nearest of these rails is not shown, so that the small wheels
rolling on it are visible. The minibogies with these small wheels –
one on each end of the (green) suspension box – can be
displaced passively or actively along the curved rails, and they can
be rotated – for adjusting the sideways tilt of the train.
Passive displacement will occur when the train is going through a
curve, and letting the train be displaced to the side by the wind may
be suitable for keeping the train vertical in a side wind. If not,
some active displacement will be needed. These rails follow the
curvature of the roof, so that the passive displacement is
self-centering. It is important to compute the roof curvature
accurately, so that these self-centering forces are optimal.
Each side of the
universal bogie has a separate L-shaped suspension plate. These
suspension plates can bend apart a little, and thanks to this
movement the two independent sides of the bogie can adapt to varying
half-beam separation.
Compressed air
comes from the tube going along the train, and it continues through a
flexible and/or telescoping tube (not shown) to the suspension box
(green), which controls the air supply to the bogie. It may be
necessary to measure and actively control the air cushion levitation
for the bogie's four corners separately, so the suspension box will
then send out these four air streams, plus air streams for right and
left side path stabilizing air cushions, plus a high-pressure air
stream for extra lifting (compressed by a small compressor in the
suspension box). These air streams (and electric cables) go through
ducts inside the suspension plates.
The (electrical)
power collector should be centered between the two suspension plates.
Perhaps springs to both sides may give adequate centering.
The air cushion
unit used is the type with varying height. Its outer box is plugged
into the end of the suspension plate. The rest of the unit can be
pushed down by extra-compressed air let into the top of the outer
box, then pressing down the telescoping inner piston-like box and
telescoping air supply tubes. These tubes send cushion air for lift,
left displacement and right displacement.
Such telescopic
movements are prone to jam when the width is large compare to the
length (in the movement direction), so it may be safer to replace
linear telescoping movement with a corresponding circle arc (hinged)
movement.
Air cushion drive
may do without springs for softening the ride, but if wheels are
used, springs and shock absorbers should probably be used. This could
be where the suspension plate is attached down in the suspension box,
but, for minimizing the unsprung mass, it should be near the wheels.
A wheel module should then be a rectangular frame with spring and
shock absorber before and after the wheel. A wheel can have a soft
part (rubber, plastic) around the rim, inside the rim, or no soft
part at all. If the soft part is air-filled, its air pressure can be
maintained by the supplied compressed air, through a hollow axle.
A
rubber wheel module might have provision for attaching a
supplementary rubber wheel module below it. This lower wheel can be
engaged to run (air pressure driven) on the underside of the beam
when hills are to be climbed.
Air
cushion drives may be made so small that they can be retracted out
through the bottom of the beam. A small vehicle for inspection (and
delivering urgent parcels) could have arms which can grab the upper
part of the beam. If it then retracts its air cushion drives, it can
swing itself to a position above the beam and be out of the way for
passing trains.
Having
separately operating wheels and/or air cushion units on the two
sides, enables designing a bogie which can hang, and perhaps move, on
one half-beam if the other half-beam collapses.
Double
Action Air Cushion
Air
cushion operation can be more efficient if the beam is designed for
double action air cushion hovering. Double action implies having air
cushion units both over and under the horizontal steel surface of the
beam. The upper air cushion lifts in the familiar manner, while the
lower air cushion, having a low pressure approaching a vacuum, "sucks
up" (letting the atmospheric pressure lift from below). One air
pump can serve both cushions, pumping from the low pressure cushion
to the high pressure cushion. Or the low pressure may be obtained
from a high-pressure air stream by means of the Venturi
effect. Valves should be able to redirect the high-pressure
stream to the lower air cushions (and the low-pressure stream to the
upper) momentarily when needed for counteracting a sudden (wind gust)
swing.
This
gives several advantages:
more
lifting force with one pump
stronger
propulsion force when valves are opened behind the high-pressure
cushion and ahead of the low-pressure cushion
more
separation between air cushion units following each other in the
same path – so that the jet from one unit doesn't brake the
following one
short
pumping distance for the compressed air gives lower energy loss
(through heat loss) and less icing
switching
(optionally reversing) air pressures by means of valves gives strong
tilt resistance, stabilizing the train far more efficiently (against
side winds) than with wheels, which would easily have been lifted on
one side, being unable to "suck the track"
 The
upper air cushion unit also acts on the side walls – because a
high-pressure cushion gives progressively higher force when
compressed. This is not the case for the low-pressure air cushion
unit below the beam, so it only acts on the beam surface above it.
(Also air surfing vanes may give sideways stabilization).
The
upper air cushion unit also acts on the side walls – because a
high-pressure cushion gives progressively higher force when
compressed. This is not the case for the low-pressure air cushion
unit below the beam, so it only acts on the beam surface above it.
(Also air surfing vanes may give sideways stabilization).
The
suction below should be carefully controlled to prevent mechanical
contact.
If the lower air cushion unit has a ferromagnetic
(steel) body, a coil (electromagnet) could be wound around it –
for giving some maglev lift.
The
jet action obtained by opening ends of air cushion units may not be
enough for giving high speed, so these minilocs should be combined
with the linear motor described below. (Somewhat larger motors and
compressors can be placed on top of the wagons.) It is still valuable
to have this jet action, as trains can then go (with reduced speed)
where linear motors are not mounted. When linear motors are used, it
may not be wise to try to use jet action, as the wrong air pressures
will now be imposed upon the air cushions.
Air
cushion units below the track could be replaced by electromagnets –
for a partial maglev. It will then be very easy to control the
separation and lifting force, but the force between an electromagnet
and iron can not be reversed.
There
could be Inductrack
coils
in the bottom of the beam if those brutal wheels are not used there.
These coils may not be needed for maglev hovering when compressed air
is used for this, but they may still be valuable for propulsion, as a
linear motor. In this case, they may not (as explained in the next
chapter) be needed all the way along the track, as it is probably ok
to pull only a part of a train. They may also be omitted at the
middle half of each beam, and at stretches where acceleration or high
speed isn't needed.
Inductrack
coils for merely propulsion could probably go partly up the side
walls of the track, and not only lie on the bottom. This should
increase the pulling power. If a train needs to be pulled on some
places (after a station, up a hill), Inductrack could be used
reversed – with those light coils on the train, and
electromagnets in the track. Those coils are light and cheap enough
to be used along the entire train, and then it is enough to have
electromagnets near poles. But now we are dealing with linear motor –
to be discussed in the next chapter.
If
wheels are not used, beams with perhaps only 1/3 of the normal height
might be used in tunnels. It may be room for these in the ceiling of
an unmodified road tunnel, in which a train may move like a bus.
The
Linear Motor
Levitated
movement implies: The wheels lose contact with the track, so
conventional wheel-driving motors will not work anymore. If we
use a linear electric motor instead, the lost mechanical connection
between the train and the track is replaced by magnetic forces, and
these forces work just like in a conventional motor: between
stationary and moving magnets. The difference is: In the
conventional motor, the movement is rotational; in the linear motor,
it is straight like the track, so the moving magnets (corresponding
to the rotor) might as well be fixed on the train, while the
stationary ones (constituting the stator) can be fixed along the
track.
Having
magnets or coils all the way along the track, will be expensive –
and add very inconvenient weight on the beams, so we will try to
reduce the size of the apparatus. We may assume that the linear
motor will only be used for real trains, and not for local trams. We
may also assume the train will not be shorter than the distance
between the poles (40 meters). We may then place stators
(propulsion modules) at each pole, and a part of the train will
always be adjacent to a stator which can pull (or brake) it. If
each wagon of the train has a tube containing permanent magnets over
its roof, the electromagnets in an e.g. 5 meter long stator set on
the nearest pole will always have at least four meters of the train
magnets under their influence. The pulling force should be
about 10000 Newton ("1 ton") per meter for a module pair.
At places where hill climbing or strong acceleration is
required, longer stators, giving more pulling force, can be mounted.
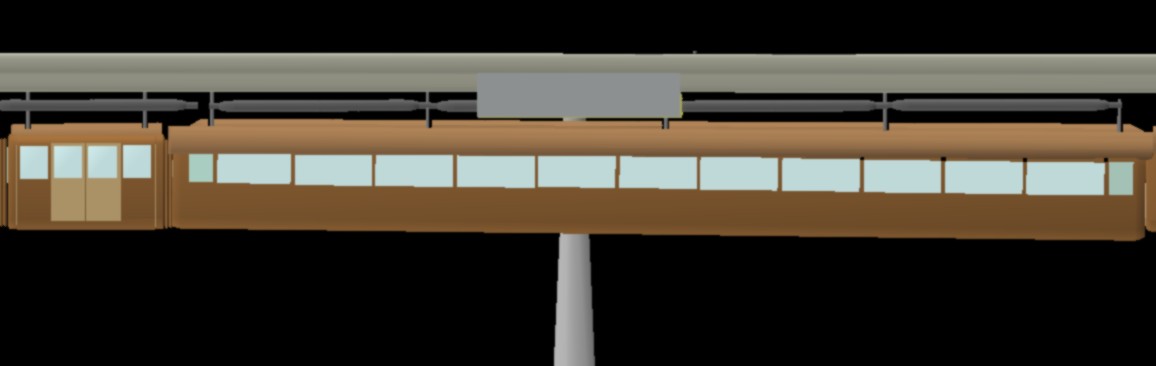
The
sausages over this train are real hot dogs, containing (4-5?)
powerful permanent magnets.
The
magnet sausages can be replaced by flat (vertical) plates containing
passive induction coils (Inductrack), or simply aluminum plates in
which currents may be induced. They will be lighter and cheaper than
the real hot dogs, but may not give enough pulling force, and they
will require different stator modules (with a slot-formed gap). If
the induction coils are embedded in the wall of a tube for compressed
air, we can use our sausage configuration – perhaps with a
rectangular cross section. But, unlike sausages, the air tube must be
continuous, so it must either let the suspension rods go up in the
middle of it, or be mounted 20-30 cm to the side of the suspension
rods. (But not be mounted on the roof, which can move to the sides
relative to the suspension rods)
Inductrack
coils may also go around the edge of each air cushion unit. This
would require a special beam or transition area having electromagnets
in the track.
The
stator modules can be mass produced in a factory, and easily deployed
from a passing service train. Each module is then pushed into a
bracket at the beam join at the pole (the lower middle part of the
splint), and one module is mounted on each side, so that the chain of
train magnets pass closely between the two.

Here
we see how the magnets are passing between two stator modules.
Each
stator module contains:
The
electromagnets nearest the ends (or Hall effect sensors) will sense
the approach of train magnets, and the module will by a radio signal
receive a request for a certain pulling (or braking) impulse from the
train. The speed of the train is evaluated and compared with
the permitted speed (as given by radio from the central computer).
The electromagnets may then be ordered to push and pull the
train magnets forward, or to slow them down if this had been
requested by the train – or if the train speed is too high.
The braking is regenerative: Regained energy is returned to the
power line.
It
may be advantageous to avoid all mechanical contact between the train
and the track, so also the brush getting power from the power line
should be disengaged. Power needed in the train may then be
fetched inductively by coils in the magnet tube.
The
pulling (or braking) impulses affect the train quite unevenly, so
some force smoothing will be required. The train magnets should
be positioned between springs in their tube, and there is not much
mechanical rigidity on the way from the magnets and down the
suspension to the passengers. The few wagons in a beam train
will be more tightly connected than in an ordinary train, so the
uneven force from the linear motor should not be a problem.
When
axle-connected wheels are not used, the wheels or air cushion units
needn't be paired, but may follow after each other. The suspension
plates (of e.g. the universal bogie) – one for the left side
and one for the right side – needn't be paired, but these two
and the current conductor can follow each other in-line. This will
give the whole suspension the narrowness which is advantageous for
use with the linear motor described here. (The train magnets may be
attached to either of the suspension plates, as both the leftside and
rightside plate will be in proper position at poles, where stator
modules are – even it the half-beams are somewhat twisted out
in the middle.)
The
various magnetic solutions mentioned here may be replaced with
electric equivalents. But these require high voltages which are
dangerous for people, and the voltages may cause sparks. It may be
assumed people will not come near the locations in question –
in or near the beam. And magnets can be replaced by much lighter
conductors, so linear electrostatic motors are certainly worth
considering.
The
Suspension
Hanging
below the bogies – which may or may not be rolling on wheels –
is the suspension, which ensures that the passengers move more
smoothly than the bogies do.
But
first some words about the use of the underside of the beam, and this
underside must, as we now will see, be smooth.
Braking
should mainly be done regeneratively by the motors, that is: The
kinetic energy of the train should be converted to electric energy
which is fed back into the power line instead of being wasted on
wearing down brakes. When the connection with a power absorbing
grid/batteries/resistors is lost, and during emergency braking, old
fashioned friction brakes are needed. The beamway has the ideal
solution for this: Let the brake pads pinch the lower part of the
beam! (Or two brake pads could be pushed apart against the interior
beam walls.) This is far more efficient than the conventional
solution: slowing down the wheels. And overheating should not be a
problem, as the beam has a great heat dissipation capability.
Here
we see the brake pads of the beam train.
They brake much more
efficiently by pinching the beam.
And the beam carries the heat
away rapidly.
This
strong braking puts extra strain on the suspension. Acceleration and
regenerative braking may give about ±0.2 G horizontal
acceleration, while friction braking should be dimensioned for 1 G.
While braking with 1 G, the force from the brakes goes down and
forward at a 45° angle. It could go through strong straps
attached at the lower end of the suspension rod, where it acts
directly on the roof arc, and may block the movement of the wheels
rolling there. But if straps tend to vibrate like a wind harp, rods
might have to be used. It may, however, be enough to let the straps
be in contact with the nacelles they pass.
This
supplementary suspension should also act as a regular vertical
suspension, able to hold the train if a regular suspension rod fails
or needs help with lifting. During a 1 G braking, the resultant force
in the supplementary suspension will increase by 41 %, and its length
(if it originally were vertical) should increase by the same
percentage. The brakes should slide backwards from the bogie, through
a distance corresponding to the height of the suspension. In order to
do this, they should be connected to the bogie with telescopic rods,
heavily springed. The supplementary suspension needn't be fully
vertical initially, but start from perhaps half the backward
movement. The regular suspension rods should be articulated in both
ends (for swinging backwards), so that they don't receive orthogonal
forces.
An
additional use for these straps is: If the bogies crash completely in
a destroyed beam, the suspension rods will be broken loose, but the
straps could give a more even (but brutal) braking if they had
several meters spare length to slip along in e.g. the lower end.
Rubber
wheels can run on the underside of the beam. They may be just
millimeters away from contact, to ensure against derailing. Or
they may be engaged to squeeze during hill-climbing. If powered
rubber wheels are used both above and below the track, the
hill-climbing ability could really be great. But those supplementary
wheels will not be needed if there are motors in the main wheels.
Now,
down to the real suspension system at the top of the wagons. A
wagon should be able to swing to both sides like a pendulum, but in a
controlled manner. The axis for this movement should ideally be
near the bogie, but then it would be difficult to control the swing.
Besides, magnets for the linear motor drive could not be
mounted on anything swinging under the beam, as they must pass
precisely between the stator modules. Placing the pendulum axis
in the roof of the wagon, where the suspension control mechanism is,
enables the suspension control to control the swing of the wagon
optimally. It may be enough simply to control the dampening of
the swing, and let gravity do the rest. In that case, we could
let the swing move a piston in an air-filled cylinder, and just
choose the size of the opening the air in the cylinder can leak
through.
Each
of the suspension rods, from which the wagon hangs under the bogies,
should be able to move sideways across the roof, both passively and
actively. They must be displaced passively when a wagon with
more than two suspension rods goes through a curve, and they should
be shifted actively to the side e.g. to compensate for a side wind or
uneven sideways weight distribution in the train.
Proactive
Suspension
Vehicles
normally have reactive suspension: By yielding for sudden jerks, they
can smoothen the ride. But the beam train moves in a simple and
thoroughly mapped environment. It identifies every pole it
passes, and from its database it retrieves some parameters about the
next beam:
This
enables the train – like a downhill skier – to assume the
best body position and degree of dampening. The train can compute how
much the beam will bend in the middle – determined by factors
like wagon weight, train speed, and bending caused by the wagons
ahead. It can then compute how much the wagon should be lifted up at
the middle of the beam.
If
the wagons are rigidly connected with respect to vertical
displacement, the proactive suspension mechanism can be used for
determining which part of the beam shall get the task of carrying the
train weight, and that generally means the train should pull itself
up primarily by the bogies which are closest to a pole. In other
words: try to achieve the above mentioned lifting at mid beam not by
really exerting force there, but by exerting the force well before
and after mid beam. This should not be difficult to do if there are
strain gauges measuring the load at each suspension.
In
connection with the linear motor, we found that we could move the
whole train by exerting force only from certain parts of the track,
and we save both equipment money and beam loading this way.
Now
we can use the same principle: dynamically applying forces to
parts, but vertically instead of horizontally, and with the
object of reducing beam loading. Distributing the force (or momentum,
as the train mass inertia permits some rapid force variation) through
the train was simple in the horizontal case: The train simply hangs
together. (And the magnets can slide, with spring damping, in their
sausages.) But in the vertical case, we find that selecting the right
train stiffness/bending is more tricky. The most important point is:
Don't apply so much stiffness (or upward bend in the middle) that
wheels in the middle are lifted from the track when the train passes
the bottom of a vertical curve.
Transversal
Force Control
The transversal
forces are those acting perpendicularly to the direction of movement,
i.e. vertically and/or sideways. The most important of these, the
gravity, need not be discussed further here. The two next to be
considered are: the wind and centrifugal forces. For both of these,
there will be a linear lateral force (directed sideways) and a
rotational force (threatening with lifting the wheels on one side),
and there are different solutions for the steady and momentaneous
components.
The sentrifugal
forces are simply determined by the speed (and the load of
passengers/cargo). The steady component is here the sentrifugal force
at the normal speed. The track is of course banked, so that the
sentrifugal force at normal speed is experienced as increased
gravity, for which the track and the train must be dimensioned. The
momentaneous component will now be experienced when the speed is
different from the usual speed, for which the track is banked, and
lateral forces will now act. These will just cause the train to hang
at a different sideways angle, so that the passengers experience no
lateral forces – only what feels best for them: seemingly a
varying gravity.
The crosswind
forces will originally be linear lateral forces, but these will, due
to the pendular nature of the train, be partly transformed into a
rotational force (roll torque). The steady component is determined by
the mean wind speed (averaged over several seconds), and the
momentaneous component is due to wind gusts.
The
principles for transversal force control will then be:
The steady
rotational forces will be counteracted by means of a sideways
displacement in the train suspension: When the train lets itself be
pushed/blown to the side, the center of gravity is no longer below
the suspension points. This creates a (gravity) torque which can
counteract the imposed (wind) torque, consequently greatly reducing
wind swings. But the momentaneous wind forces are too rapid and
unpredictable to be controlled in this way. They should be resisted
by stiffening the suspension, but if the force becomes so strong that
wheels on one side are about to be lifted, additional resisting roll
torque will be needed. With compressed-air
hovering, the ability for suction (reducing the air pressure to
below one atm) can give a higher roll resisting torque. This
torque will be still higher if the Double
action air cushion principle is used.
It can be
difficult for the train to distinguish between the swing caused by
the wind (which should be counteracted) and the centrifugal swing
(which should be permitted). There should therefore be an
XY-accelerometer below the pivot, and it should check that the
acceleration vector goes orthogonally towards the floor.
Another
stabilizing mechanism is available, at least at high speeds: Let the
train have ailerons (rudders) on the bottom. It is easy for a
computer to control them to counteract swings, especially if the
computer is connected to wind sensors which detect gusts from the
sides.
If the imposed
roll torque is still too high, the force control system must give in
and allow the train to swing to the side. This will be an annoyance
comparable to the turbulence annoyances during flights. If this
happens often, it may (for
low-speeds, at which stabilizing ailerons are not so efficient) be
necessary to use a side rail at the bottom of the train. Support
wheels there could run horizontally on the side of the side rail
(which can be shared by two adjacent beamway tracks), and the
suspension rods should be shifted towards this side, so that the
bottom of the train swings towards this side. Or the support
wheels could be vertical, running in a groove on top of the side
rail. The suspension rods should then be shifted away from this
side, so that some of the train weight rests on the side rail. (This
variant will be more disturbed by snow in the support track).
Air
cushion trains can replace support wheels with air cushion units, and
may not need to displace the train sideways, as these units can both
blow and suck. But these high-speed trains are less likely to need
such side support, due to the the strong stabilizing effect of
ailerons and suction-enabled compressed air cushion drive. Besides, a
high-speed line is more likely to be moved down into a tunnel on
windy stretches.
The
strength of the beamway will be significantly improved if there is a
double track with a T-shaped support bracket midways between the
poles. The pole separation can then be significantly increased.
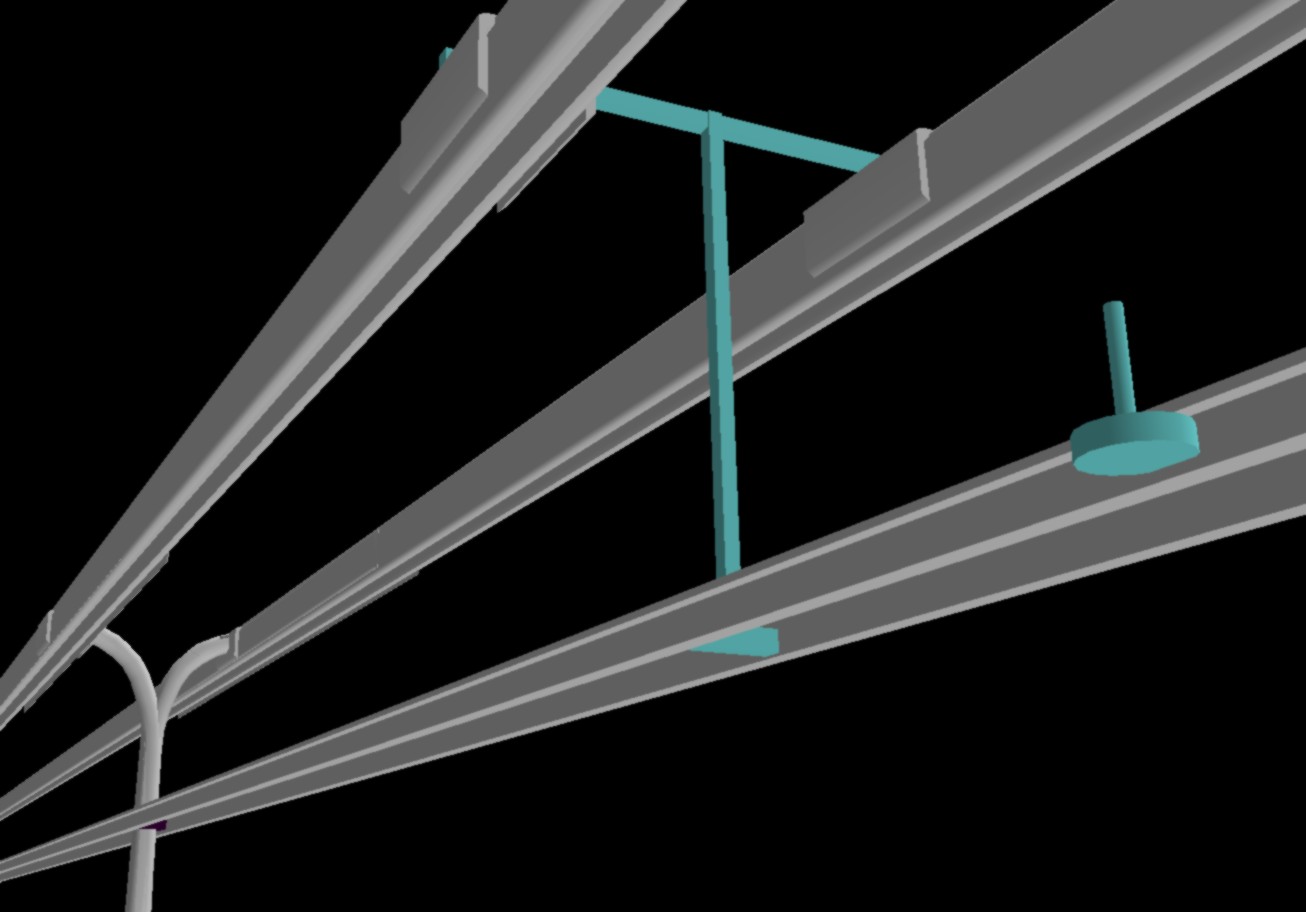
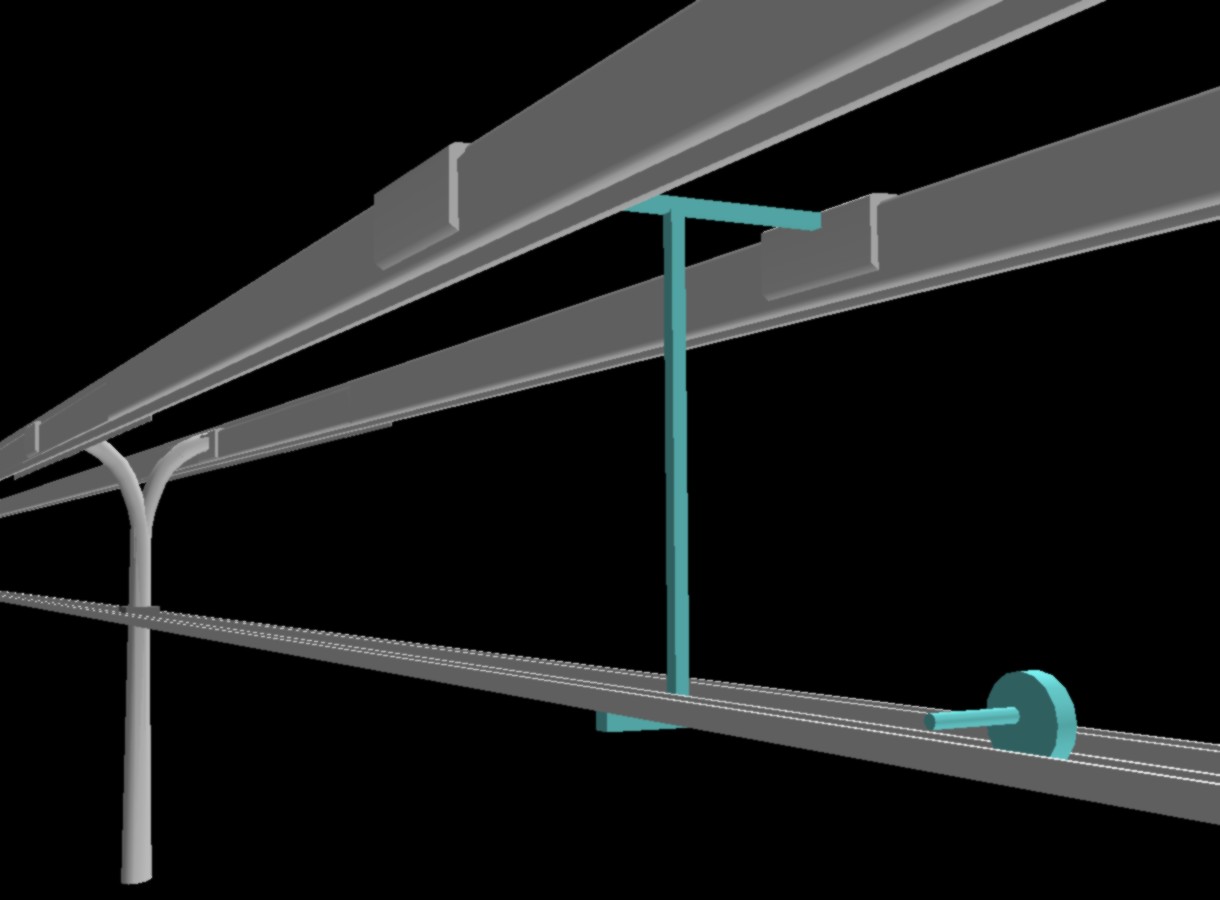
No
matter which support method is used: Where side support is not
needed, the train can simply center its suspension and optionally
retract its side wheels. Exchangeable cabins should not have to be
equipped with such wheels, but it may be enough to have these wheels
at the front and rear end of the center wagon, and at the locomotives
(shown at each end of the brown train).
If maglev
propulsion is used, it should be possible to make maglev side support
rails, but the side support should be less necessary in conjunction
with maglev, because the magnetism can simply be reversed for pulling
down on the side where the bogie is about to get lifted.
The
(non-rotational) lateral forces at the wheels will, if they are
small, be counteracted by means of a curved track profile: Lateral
forces cause the wheels to go higher up on the side of the track, and
the gravity will then give a progressively increasing corrective
lateral force. Flanged steel wheels will be ensured strong corrective
forces from their flanges. Rubber wheels fit well in a curved track,
but may not get sufficient track width, so the proposed rubber wheel
depicted here has steel sides which can act as firmly delimiting
flanges. These forces will become rather brutal at high speeds, but
for high speeds with wheels, partial
levitation should be used. This method uses airsurfing against
vertical beam surfaces for obtaining the corrective forces in a soft
manner.
A special kind of
transversal force control is: Prevent the train from penduling when
the elevator is going down – to position the elevator at the
edge of the (very low) passenger platform. The active suspension
might do some extra stabilization now, but the main trick is: The
elevator has a foot which reaches the ground in a braking manner
while the elevator bottom is still some toe-heights above the
platform.
Spine
Trains
We
may now for a moment digress to alternative train designs which are
somewhat different from our main recommendation, and take a closer
look at the vertical chassis design mentioned under “Are Strong
Beams needed?” above.
The
first one is compatible with the 2C-beam design, but if trains can
run unmanned, there is probably no point in connecting these cargo
wagons to the passenger wagons/cabins.
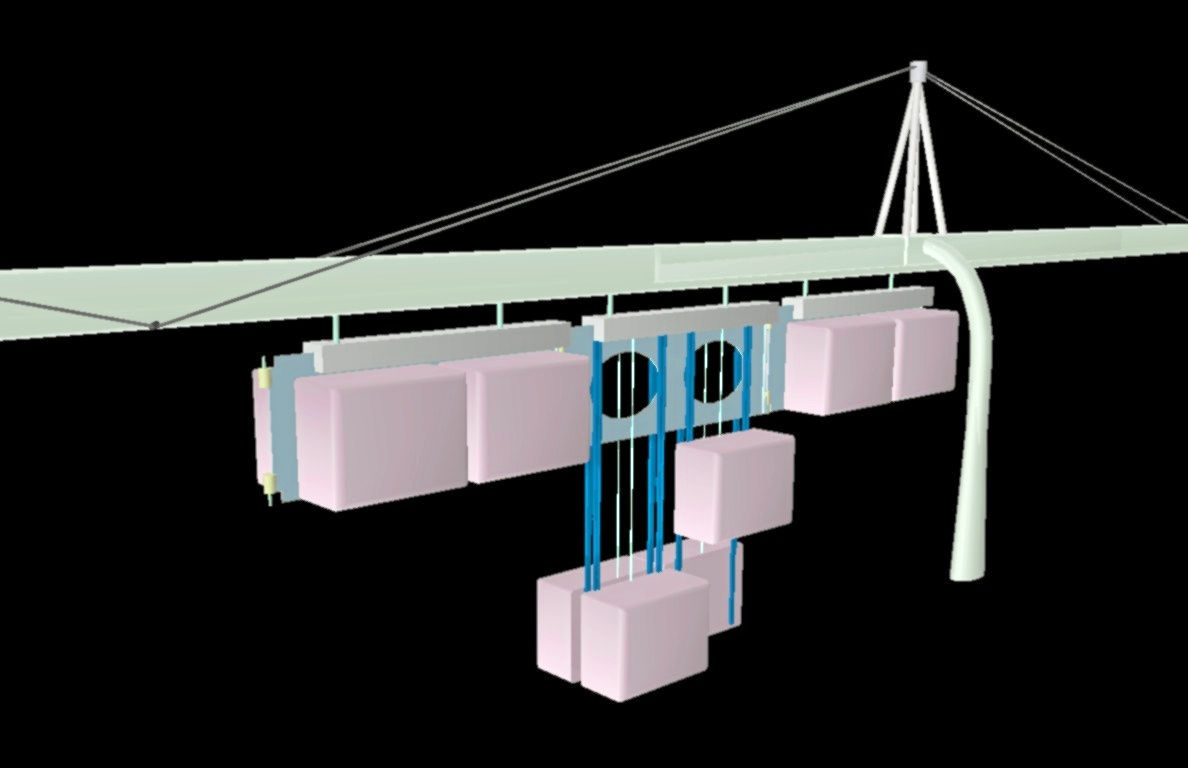
Three
vertical chassis cargo wagons. They are connected with hinges
in all four corners. The upper right hinge can pull and push.
Adding
empty wagons will improve the load distribution.
One or more cargo
containers can be replaced with a motor pack which connects to the
nearest bogie – no locomotive needed.
The train can put a
container down upon a shopowner's pickup – no station
needed.
This beamway is reinforced with (carbon fiber) wires,
although the strong spine should reduce the need for beam strength.
Suitable
wagons, for giving the required spine strength in conjunction with a
partly flexible movable beam, would be the vertical chassis wagon for
cargo and the exoskeleton type for passengers. A separate article
discusses a next generation beamless
beamway.
The
Cabins
A
wagon = a set of bogies + a suspension unit + a cabin. In a
conventional train, this sequence goes upwards, but in the beamway
train it goes downwards. And normally, the suspension unit is
not noticed as a separate unit, but when the passengers are in a
separable cabin, things are different. A wagon can have its
suspension unit integrated in the roof, or it can be separable. If a
bogie is motorized, it (and its suspension unit) can be regarded as a
microlocomotive which may be programmed to run independently to
another train needing it.
When
the beamway can deliver its separable cabin by lowering it down upon
the surface of the receiving vehicle, it interfaces nicely with
various other means of transportation like boats, conventional trains
and buses. They hold cabins from below – by simply letting
cabins stand upon a surface, so a cabin can be transferred to and
from the beamway with a very short transfer movement – a few
centimeters.
Flying
contraptions like planes and blimps are not so suitable for drop-down
delivery, but the beamway is able to come close enough to them to
facilitate simple cabin delivery horizontally.
This
article is not the place for envisioning the potentials of such
interaction, just the technical details.
First
of all: The cabins must have light weight. Forget about
conventional train design. Steel should be avoided. We
are talking fiber-reinforced
plastic (FRP), or at least aluminum.
We
will consider two ways of grabbing the cabin.

The
most obvious, and seemingly most elegant solution, is to make the
roof strong and double. The outer shell of the roof has a slit
along the middle, from front to back. It can be lifted by means
of a steel rod with something like a row of small propellers which,
when turned to point along the rod, can be inserted into the slit.
The "propellers" are then turned 90°, and
the cabin can be lifted.
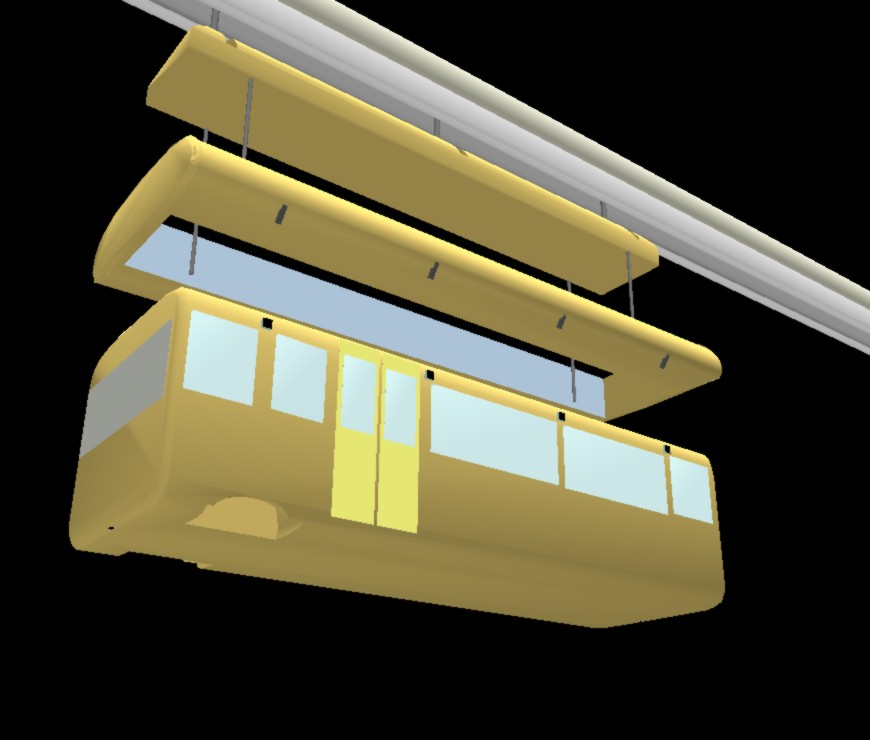
The
other method requires holes on the upper edge of the wall. (Visible
in this picture as black rectangles between the upper window
corners.) A large frame is lowered down upon the roof, and its
edges go down to cover the upper part of the wall. One steel
claw will now be aligned at each hole, and together they get a secure
grip.
If
the row of "propellers" misses its slot, or if the slot is
covered by snow, ice or dust, the first solution will fail. Besides,
the roof must be very stiff and strong for this method to work. If
there are two slots (and two rows of "propellers") near the
walls, the forces would be more correct, as they would pull along the
walls rather then bending the roof. But the above mentioned
problems will remain.
The
frame, however, will more easily find its position around the roof,
and holes in a vertical surface are less likely to be obstructed by
e.g. snow. Besides, the frame fits nicely around the suspension
unit – a connection unit hanging under the suspension unit
would not control the movements of the cabin so forcefully and
precisely. That is why the pictures here are favoring this
method.
The
sides of the frame should be as narrow as possible, as this width
will reduce the sideways travel of each suspension, and hence the
curve negotiation capability.
But
the suspension unit can also become flush with the wagon as shown
here.
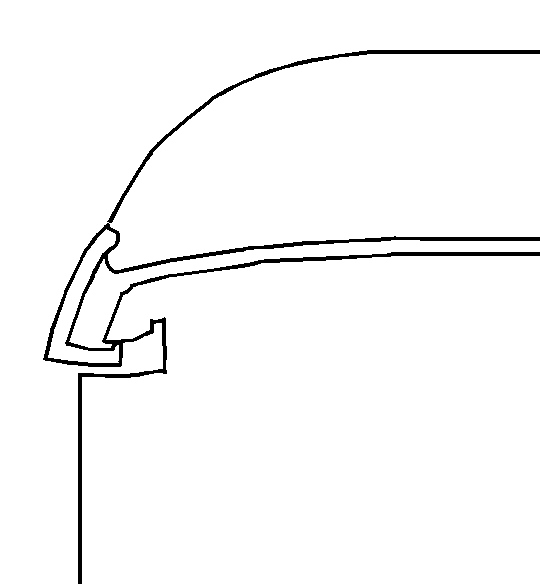
A
suspension able to move the wagon e.g. ± 10 cm will suffice
for placing an ordinary wagon upon a properly positioned immobile
platform. This will come handy at a service platform, as the
suspension can easily and safely be disconnected from a wagon that is
held from below. Reconnecting a series of displaceable suspensions,
however, will require manual work by service personnel. But a
normally-looking wagon can be rapidly delivered to and fetched from a
properly positioned ( ± 10 cm) platform (like a ship deck) if
a connection mechanism (as depicted above) is used.
The
Load-carrying Capability
As
a train and beam design have now been recommended (here and in the
introduction), we may evaluate it in
comparison with the ideal vertical chassis design.
The
beam: 40 m between poles, 20 m splints on poles, giving a 20 m weaker
midbeam between splints.
The
trains (described in the introductory article):
(Assuming
a 3 or 4 m long center wagon.)
We
may assume that the short version will never load the midbeam with
more than half of its weight, provided its weight is being spread by
the center wagon pulling both passenger cabins at floor level. The
loading on the midbeam will probably be highest when the end of the
train is there, so it may be possible to reduce this loading through
intelligently controlling the proactive suspension.
The
long train is so long that it needn't load the midbeam at all. It
could put its weight on two poles, and the simple tensioning will
relieve the midbeam of considerable weight. But this will cause a
large midbeam load when an end of the train passes midbeam, so it may
be better to reduce the simple tensioning for the long train, and use
intelligently control of the proactive suspension instead.
A
long freight train with vertical chassis would certainly give the
highest degree of load control, as it could be programmed for bending
vertically to follow the contour of the track, yet not follow the
midbeam downwards.
The
High-speed Train
Various high-speed
technologies have now been discussed, so we may now try to choose the
most promising and practical ones.
Two of the
air-cushion schemes described seem to be most efficient:
Wheels
are used, but vanes for airsurfing – or air cushions –
are used to take most of the weight away from the wheels. And vanes
or air cushions giving lateral stabilization (airsurfing against
vertical beam surfaces) relieve the wheels from sideways-acting
forces. This important compromise is described under A
Compromise Bogie below.
Wheels
are not used – as described in the chapter Compressed-air
Hovering and Propulsion.
A
bogie design for both cases is described under A
Universal Bogie.
The magnetic
hovering and propulsion schemes may not be advantageous at all, and
they will certainly make the beamway line much more expensive.
It may, for
advertising purposes, be wise to aim at claiming two or three times
the permitted car speeds. If the speed limit for cars is 80 km/h, it
may be realistic to aim at 160 km/h for the wheel-based trains, and
perhaps 240 for the hovering type. If there are 100 km/h roads, then
perhaps a 2.5x advantage may be a suitable claim for hovering trains.
The train wagons
described here were designed to be versatile – with that funny
looking hat from which exchangeable cabins could be lowered. But the
high-speed train will probably have conventional aerodynamic wagons
without any cabin exchangeability. It should have the elevator built
into the end of the front wagon – occupying e.g. the last 3-4
meters of a 24-28 meter long wagon. And it could be made aerodynamic
by having a windowless bulge containing a toilet in front. Such a
bulge should have an evacuation door in the end.
Alternatively, a
compressor locomotive could be used before and/or after the train,
and tubes for compressed air could be going through the roof of the
train. The compressed air could be useful also if wheels are used, as
the wheels could be turbine driven by the air. Mechanical energy from
the locomotive can in this way easily be delivered to all the wheels
of the train. But it would be more efficient to have compressors near
the bogies – if high enough power and low enough air resistance
can be obtained in this way.
If the train is
for very high speed, also the rear wagon should be aerodynamic –
perhaps with a toilet in the bulge. If compromise bogies are used,
the rear wagon could be a versatile one, long or short – to be
exchanged with a local train, or have a cabin which can be lowered
down upon e.g. a barge or trailer.
High-speed
wagons should have a set of stabilizers on the bottom – like
anal fish fins, but at least five side by side. The outer ones should
be able to detect side wind gusts, and the whole set should then be
rotated sideways to counteract the roll torque from the side wind.
This stabilizing roll torque will come in addition to the roll
resisting torque from the bogies. With wheel bogies, this torque is
limited by the danger of wheels being lifted on one side, but with
compressed-air
hovering, reversibility – the capability for suction
(reducing the air pressure to below one atm) can give a higher roll
resisting torque – particularly if there are (reversible) air
cushion units also under the beam.
In case of a beam
collapse, a high-speed train would be somewhat safer if all its
bogies were tied together with one strong and slightly flexible cable
on the left side, and one on the right side. These could be air tubes
from a compressor loc. Falling down from a destroyed beam would now
be a more gradual process – like a conventional train
derailing, but more unlikely.
Beam
Irregularities
A beam
irregularity which just causes annoyance and material wear at low
speed could cause a crash at high speeds, so special precautions will
be required for fast trains. An irregularity could cause a small and
sudden detour for parts of a bogie (a wheel or an air cushion unit),
sideways or vertically. Detours sideways are unlikely to occur
unexpectedly. They are probably caused by inaccurately built tracks,
and the sideways-acting air cushions (or windsurfing) – used
for both partial levitation (with wheels) and full air cushion
levitation (without wheels) – should be able to deal with such
irregularities quite well.
A
vertical irregular detour could be caused by an object lying on the
track, or the beam may be sagging down in the middle. A conventional
railway line is very easy to sabotage by throwing an iron rod upon
the track. A beamway is much harder to sabotage: It will require
something like precision shooting with a slingshot, or climbing up a
ladder or pole. If the beamway, as proposed above under The
Control System,
checks for a clear path by sending a microwave or ultrasonic signal
through 1-2 beam lengths, it should be able to detect at least large
obstructions. It will still be wise to let the train's first bogie
have a scoop shovel in front, as the detector is unable to remove
objects, just warn trains.
Wheels will be
sensitive to objects in the path – particularly steel wheels
hitting metal objects. Air cushion units could more easily be
designed to deal with this. The trailing valve could simply yield by
swinging up when hit by something hard. The leading valve could yield
by retracting the valve in its own plane. The symmetry of the
hovering bogie could be retained if all the valves could yield in
both ways.
Another vertical
irregular detour is: A beam is sagging down in the middle. This
should not be confused with the (predictable) bending a beam does
while it is loaded, as a beam will not have time to bend much when a
train is passing at high speed, and at low speeds the train's
suspension can easily adjust to height variations. (The last part of
the train will experience some beam bending done by the first part,
but this is predictable.)
A
car should generally have as little unsprung weight as possible in
order to avoid receiving hard knocks from an uneven ground. Wheels
must imply a considerable amount of unsprung weight, while air
cushions can seemingly give zero unsprung weight if they are thicker
than the obstacles. This holds not only for reactive suspension, but
also proactive suspension. The beamway system should have a database
containing information on the extent of beams sagging of each beam,
so that the proactive suspension control can increase the air flow
and hence the air cushion thickness at the bottom of the sagging
beam. This is more elegant than doing the proactive suspension
control down in the suspension unit. If we look at the beam section
pictures under Compressed
Air Hovering and Propulsion, we see that the lid will remain
quite closed even if the air cushion unit is raised considerably –
and that the side walls of the beam should be vertical for this to
function properly. (The middle part of the inner beam profile may
bulge outwards – to give room for the axle of wheels which can
slide inwards along their axle.) But it it is not enough to vary the
airflow: The air cushion unit must be able to lower their valves
considerably, so perhaps each air cushion unit should have a double
roof. The lower one, to which the valves and dividing walls are
attached, could be pushed down by an upper air cushion when increased
hovering height is needed. This method will entail the problem of
keeping the lower unit part level.
An
alternative method for following the sagging beam could be to let the
whole air cushion unit go down – by letting the last (vertical)
part of each air supply tube be telescopic. This would simplify the
air cushion unit design, but will increase the unsprung weight
somewhat.
Both
methods will permit independent movement for the four air cushion
units. For a car, such an independent suspension for the four wheels
is desirable, but for the beamway train, it is not. The left and
right side height adjustments should go together – to ensure
equal halfbeam sagging on the two sides. It may now seem sensible to
propose method three: let the common (vertical) air supply tube for
the whole bogie be telescopic, and we are indeed coming back to the
old concept of suspension control at the suspension rods –
those going down to the wagons.
So
– to what extent could we give in to the urge to choose a
simplifying centralization? The salient point is: How fast do the
height adjustments have to be? A 40 meter long beam is traversed in
half a second if the train speed is 288 km/h, and this might be a
suitable design goal for a hovering train. A full air cushion height
change might then have to be completed in about 200 milliseconds. (If
air doesn't leak out this fast, the opening of valves needed for
propulsion should mainly be done when fast height reduction is
needed.) We must choose a height adjustment method for which the
unsprung weight is small enough (and the correcting force is large
enough), so that a full height change can be completed in less than
200 milliseconds. A good solution will permit high speeds, and permit
some beam sagging before the halfbeams will have to be turned
upside-down.
The
correcting force needed will probably require another air supply
giving an extra high air pressure, delivered by an extra compressor
stage. If the first method (increasing the air cushion thickness) is
used, the high pressure air is sent into the upper air cushion
compartment. For the second method, with four telescoping tubes (each
having an inner tube sliding within an outer tube), each inner tube
could have a closed end (above the main air entrance), forming a
piston which is pushed down by the high pressure air. Similarly, for
the third method there will be a single piston in the suspension
rod/tube. If the high pressure is needed infrequently, it may be
generated by heating the air cushion – perhaps even by igniting
an injected fuel.
For
the first two methods, the extra compressor stage could be on the
bogie. For the third method, an extra tube for high pressure air
should come from the compressor locomotive or the train – so
that the unsprung weight of each bogie could be low.
For
the moment, before calculations for comparing the three methods have
been done, the second method may seem a good compromise, having the
advantage over the first one that the lowered part of the air cushion
unit is easily kept level.
A Compromise
Bogie
The
compromise implies: We are aiming for quite high speeds, but not so
high speeds that propulsion (linear motors) must be provided by the
track. This means the train line will be as cheep and simple as when
plain old-fashoned wheel bogies are used. Wheels are used for pulling
(and regeneratively braking) the train, but only to the extent wheel
forces are needed. Air cushions lift as much weight as possible, but
are controlled to stop lifting before wheel traction is lost. At low
speeds, air cushions are unimportant and may be dispensed with. (In
case of e.g. compressor failure, the train could still roll along at
well beyond 100 km/h, with only moderately annoying delays and
mechanical wears.)
As
the speed increases, the forces to be excerted by wheels are
decreased, so the load carried by wheels may be reduced by perhaps 80
%. (Emergency braking is not done with wheels, but by clamping the
beam.) As the air cushions take care of the side forces, the forces
acting on the wheels are greatly reduced, so speeds a little above
200 km/h may be achievable. When movement is controlled with wheels,
the speed can be accurately controlled while stopping in a hill or in
strong winds.
Simple
air-surfing vanes could be used instead of compressor-generated air
cushions, but investing in air cushion equipment for the bogies gives
some extra advantages:
The
air cushion action can be accurately controlled.
Low-pressure
air cushion pads can be used under the beam.
Pressures
in the upper and lower air cushions can be rapidly reversed for
resisting wind swing.
Damaged
wheels can be assisted by air cushions – also at low speeds.
Air
cushion use can be increased for passing gaps – like in
switches and crossings.
Adverse
forces are avoided when the train is running backwards
Proactive
Suspension control
can be performed by a pneumatic lifter between the bogie and the
suspension rods.
Various
wheel types
The
flanged type to the left will not be interesting, as air cushions
acting on the side walls will ensure proper tracking.
The
steel wheel in the middle is simple and reliable. It shouldn't be too
noisy when most of the forces against the beam are eliminated by air
cushion operation. It has the advantage of being thin, giving low air
resistance at high speeds.
The
special rubber wheel to the right gives higher friction, so more of
the train weight can be air cushion carried before the pulling power
of the wheels becomes too low. If the rubber part of this wheel is
destroyed, the wheel should be able to function well as a steel wheel
– at least if the air cushion assistance is automatically
increased. Well armored compact rubber should work well here.
The
above picture doesn't show how the hub motor occupies most of the
wheel, but this is shown in the next picture. The hub motor will in
fact be a very thick stationary axle for the wheel, so there is no
need for an axle connecting two wheels running side-by-side. This
means the bogie can easily adapt to half-beam separation variations.
 The
suspension.
The
suspension.
The part inside the train is approximately as shown in
the first picture in the chapter A
Universal Bogie above: The suspension can move sideways
(passively or actively) by means of minibogies rolling along roof
rails which follow the curvature of the train roof. But in this
design variation the entire suspension control mechanism (except the
motors in the minibogies) is moved up to a nacelle above the train.
This
design variation doesn't use a centralized compressor, but has one
compressor in each suspension. As the compressed air has to run only
a short distance, it will lose little of its heat on the way. Such
near-adiabatic operation gives energy efficiency as well as little or
no problems with freezing at the air cushion pads.
The
bogie, its suspension and compressor hang together as one unit which
can easily be detached from the wagon below – because only
simple suspension rods (each with a power or signal cable attached)
go down to the wagon. (The contents of the nacelle could have been
placed in the bogie in the beam, but this would have caused a much
stronger air resistance.) This combined unit may function as a
microloc, capable of moving by itself.
The
small distance between the roof rails means that the lifting force
from them can continue along one (carbon fiber) strap running around
the wagon between windows. It is also easier to protect the train
interior against precipitation etc. when there is a narrow slit in
the roof.
The
minibogies in the top of the wagon should be about half a meter long,
and have notches under each end. Horizontal crossbars on the lower
end of the two suspension rods are held in these notches. (One notch
should be slightly displaceable – to correct for geometric
inaccuracies when the minibogies go down the steeper part of the roof
rails. ±80 cm displacement should be allowed.)
The
picture seems to have one suspension rod going up to a piston in a
cylinder marked Lifter. (A suitable travel length for this piston
could be 20 cm – for dealing with slope
changes.) This picture part should be regarded as containing two
superimposed suspension rods going up to two lifter cylinders. (A
signal cable runs along one of these rods, and a power cable along
the other.) Above these cylinders, the upper suspension rods are
attached in-line at the central part of the nacelle. These are
depicted in two colors for distinguishing those going to the left and
right side of the bogie. The short ones go to the air cushion pads
working against the bottom of the beam. The four upper suspension
rods are hollow (or supplemented with tubes) for transferring air to
or from the air cushion pads. Three such rods/tubes may be needed for
each bogie side – in case separate air cushions are needed
against the side walls of a half-beams. Alternatively, sensors in the
air cushion pads can monitor the distance to the side walls, and
local valves can direct more air to the side where the wall is too
close.
The
upper suspension rods should be fixed in relation to the nacelle, so
that train tilting is handled by only the lower part of the
suspension. But there should be a little flexibility up here, so that
these rods can adapt to some variation in the separation between the
half-beams.
The
mechanism in the nacelle is as follows: The compressor creates a high
air pressure in the pressure tank, from which computer-controlled
valves let air act in the lower or higher part of the system. Lifting
or tilting the wagon is done by increasing the air pressure under the
pistons in the lifter cylinders, and all the suspensions should
co-operate in doing this in the same manner. If done equally for both
cylinders, the wagon is simply lifted. If done differently for the
left and right cylinders, the wagon is tilted. The train may be left
to get its natural tilt, as determined by the gravity and the
centrifugal forces, and this is what the passengers will feel is
correct. This can be done by connecting the lower parts of the
cylinders with a shunt tube which equalizes the pressures. There
should be an adjustable valve in this tube – for controlling
the air resistance in the shunt, so that penduling is sufficiently
damped.
Air
from the compressor is also sent up to the upper air cushion pads
(three on each side), and the lower air cushion pads (one on each
side) may be connected to the air intake of the compressor. A valve
should be able to rapidly exchange these two airflows if a tilting
force is threatening with lifting up the wheels on one side.
The
two lower suspension rods can be rotated when they are being attached
to or disconnected from a wagon, as they hang under pistons which can
be rotated in circular cylinders. A wagon (or train) to be attached,
is lifted by a bottom support so that the horizontal crossbars of all
the (properly aligned) low suspension rods are swallowed by roof
slits. A maintenance mechanic then goes along the roof and turns each
suspension rod 90°, ensuring each crossbar is being attached to a
minibogie in the roof. A single microloc – a bogie and its
suspension unit – may be exchanged on a wagon hanging under a
special (open) service beam.
Each
wheel in the beam contains a hub motor, which (as shown by the inner
circles in wheels in the picture) occupies most of the wheel volume.
Such a motor (a Protean
motor, measuring 42 cm in diameter, 11.5 cm thick) develops 80 hp at
2000 rpm. A wheel diameter of 55 cm will give 200 km/h.
This
power gives 320 hp for one bogie, or 1920 hp for a 6-bogie front
wagon. (This is a 28 meter long minimal train with a rear elevator. A
short or long wagon may be added, but as this will bring along
correspondingly more motors, we can check the power requirement by
considering the single wagon train.)
If
such a train, weighing perhaps 20 tons, were to negotiate a 10 % hill
at 200 km/h, it would be ascending at 5.56 m/s, needing 20000x5.56/75
= 1482 hp for just lifting the train. Most of the rolling resistance
will be removed by the air cushions created by means of additional
motors, but the air resistance remains to be overcome. The air
resistance at 200 km/h would require about 1000 hp. This is the air
resistance for an ordinary train. The beamway train has a
considerable additional air resistance from the bogies in that narrow
beam. On the other hand, it hasn't that air-resisting underside, and
the air can be displaced to four sides instead of three. We might
guess if these differences cancel out.
1920-1000=920
hp remain for hill-climbing + the (strongly reduced) rolling
resistance. This means an ascension of less than six percent can be
managed at 200 km/h. At 140 km/h, the air resistance takes 500 hp and
getting up the 10 % hill takes 1037 hp, leaving well below 800 hp for
acceleration. If we want to avoid slowdowns in hills, there are
several solutions:
Get
some propulsion from the compressor by letting the two rear air
cushion units open up their rear walls.
Run
with a wagon attached. A 24 meter rear wagon with powered bogies
adds motor power about as much as it adds weight, but doesn't add
much to the air resistance.
Make
the train narrower, with passengers sitting 2+1 abreast. This
decreases both the weight and air resistance, but not bogie power.
Use
a miniloc before and/or after of the train.
As
the miniloc is needed only above 120 km/h, it is unusually easy to
use. This is because the higher the speed is, the lower is the
pulling force needed for supplying a certain number of horsepowers.
Low pulling force means we needn't worry about using a loc having a
small fraction of the train's weight. A miniloc with e.g. 2000 hp
should weight just a few tons, and if it hangs under eight wheels,
the wheel-protecting air cushion needn't steal much traction,
ensuring weight is put on the wheels only when really needed for
traction.
Having
an additional detachable microloc fore and/or aft gives little extra
pulling power, but this gives some new possibilities. These microlocs
may run away by themselves to deliver parcels in the vicinity. Or the
one in front could run 1-2 kilometers ahead of the train to check
that the track is ok.
A Lighter
Beam?
We
may now consider saving beam steel – by using the strategy
described under Are
Strong Beams Needed? above.
Could we even try to do without the steel beam – as envisioned
here?
This
may not be wise. A continuous beam is valuable for:
Keeping
a series of “poles” hanging in a cable span aligned.
(Stiffness is easily obtained if a double-track line goes there.)
Ensuring
solidity of the track. A pole on a beamless track could more
easily become displaced, with catastrophic consequences.
Permitting
emergency braking, during which a rigid beam will let the strong
deceleration forces become distributed among several poles. (If the
pole tops are connected with wires, some force distribution occurs
backwards, but beams have the important advantage that they can keep
poles vertical – by keeping fixed the angle between each pole
and the beam.)
Supplying
power to all parts of the beamway line. It would be really awkward
to provide power under and upon the ground along the line.
Permitting
air cushion and other hovering schemes, which need a larger area –
especially if propulsion thrust is to be provided.
Building
a line through difficult terrain, as described under Building
a Beamway
below.
Letting
Service wagons and other mini trains not need to have that
impractical long spine.
Quite
small beams (e.g. 50 centimeters high instead of 80) may suffice if
the mini trains are limited to 3-4 tons. Air
cushion units need little height in the beam – although the air
resistance of their movement through the beam would be lower if they
could have plenty of space. Wheels might only be needed as a
supplement – for low speeds, or for use in conjunction with
weight-reducing airfoils – and in these cases they could be
quite small.
Small
beam dimensions will be OK in tunnels, as they can there easily be
fastened with small intervals. If the beam is hanging in a
(cable-stayed) span, it is quite easy to have many suspension cables.
If the beam is held by poles or racks, it will be inconvenient to
have shorter intervals between them. The train should then lift
itself at fewer suspension points by increasing the air cushion
pressure at the poles and splints rather than letting the weight be
evenly distributed between all the suspensions. When an air cushion
unit follows a sagging beam downwards, it is not to exert pressure
there, but to be ready to exert a stabilizing sub atmospheric
pressure.
Switching
A
point (switch in USA) is a place where more than two
beams meet, enabling two lines to merge into one, or one line to
split in two.
(General
description in Wikipedia)
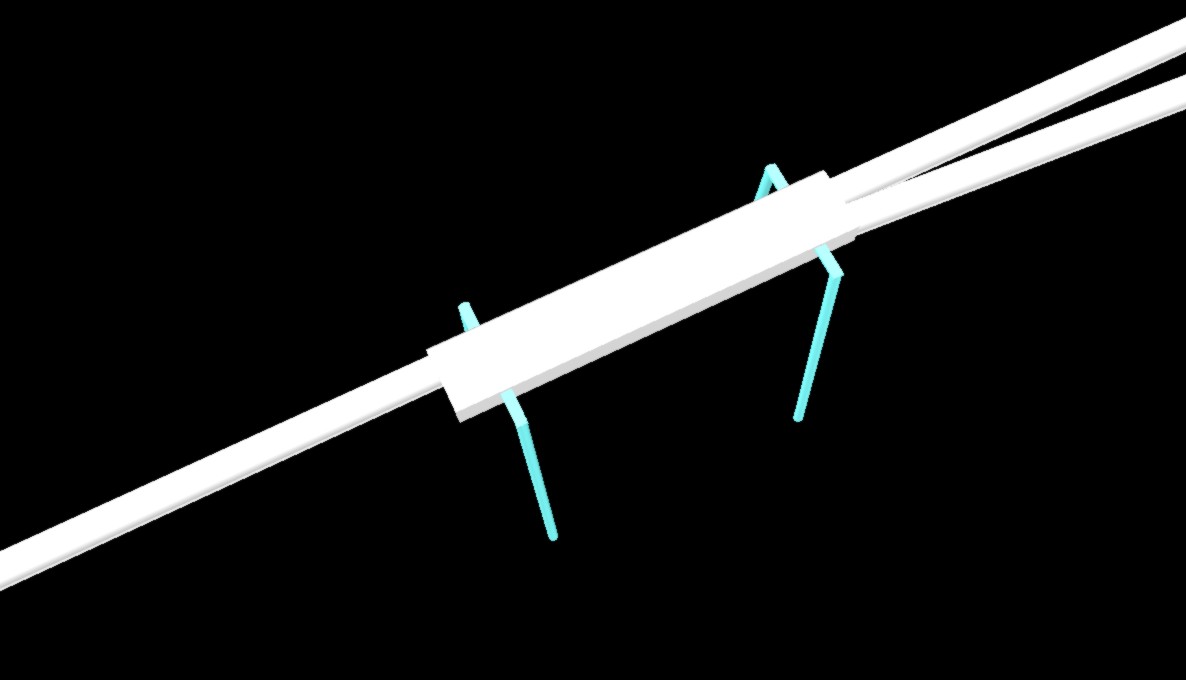
A
special transition area for line switching

The
inverse U bracket cover (with its beam-holding tongues and power
line) is not shown here – to reveal the interior.
The
gray area is traversed by wheels, so any additional support –
vertically from the cover – must be in the undisturbed white
area.
The vertical plate on the right side is one of two such
supports shown. It holds up the “Manhattan” in the
middle. This is the so-called frog, and it is strengthened by having
extra steel on the underside.
(The
discussion
area
of the above-mentioned Wikipedia
article tells how the term frog came from 19th century horse hoof
terminology. Modern readers are probably more familiar with Manhattan
than with horse hoofs.)
The
stiffness of our trains is well suited for crossing the weak and
missing parts of the switch area, particularly if air cushions are
used, and/or the proactive suspension is programmed for removing
weight from a bogie while it passes here.
Now
to the problem of choosing the path through the switch area. If the
direction is from the multi-track side to the single-track side
(called the trailing
movement),
this is no problem, but for movement in the opposite direction, a
track choice has to be executed. This can be done by the vehicle, or
by a switch mechanism. Altering the path in the switch would take a
few seconds, and this is rather much if a stream of small vehicles is
to pass through. Such a stream is what SwedeTrack deals with, so this
system expects the vehicles to do the shunting (switching), like cars
in a road crossing. But for our trains with several bogies, it is
extremely important that all the bogies in a train be sent into the
same track, so here it is natural to let the line do the switching.
It would be foolhardy to expect computers to dispatch all bogies
without a glitch, and impractical to have secure steering on all the
bogies. When we are dealing with real trains, several switching
operations will rarely be needed within one minute, so if high speed
operation is valued, the method described under Movable
Beams above, would be best: Make
a track switch by pulling one end of the beam so much sideways that
this end is aligned with another, adjacent track. It is for bus
traffic it would be nice to have the transition area switches
described in this chapter.
 The
switching mechanism could simply be a mini version of the moving
beam, having two U-shaped steel rails. As shown in these two picture,
the left (pivoted) ends should be attached near the end of the left
beam, while the right ends should be movable between the two tracks.
The
switching mechanism could simply be a mini version of the moving
beam, having two U-shaped steel rails. As shown in these two picture,
the left (pivoted) ends should be attached near the end of the left
beam, while the right ends should be movable between the two tracks.
 This
arrangement would have the added advantage that the transition area
would give continuous and quite firm support for the wheels. But the
switch mechanism would have to adapt actively to trailing movement
(from the right). As a safety mechanism, the
pivoted ends of the U-rails should be able to be swept aside by
wheels arriving from an unexpected track.
This
arrangement would have the added advantage that the transition area
would give continuous and quite firm support for the wheels. But the
switch mechanism would have to adapt actively to trailing movement
(from the right). As a safety mechanism, the
pivoted ends of the U-rails should be able to be swept aside by
wheels arriving from an unexpected track.
 Another,
and mechanically simpler solution, would be to have a single moving
rail with the same U-profile, and pivoting fastened near the middle
of the transition area, where the two middle wheel-paths (gray) meet.
The moving end would be placed over either rail portion of the single
track (to the left in the picture).
Another,
and mechanically simpler solution, would be to have a single moving
rail with the same U-profile, and pivoting fastened near the middle
of the transition area, where the two middle wheel-paths (gray) meet.
The moving end would be placed over either rail portion of the single
track (to the left in the picture).
 This
rail would be pushed to the correct position by any trailing wheels
(from the right), but such pushing sideways with wheels would be a
crude, low-speed mechanism which should not replace decent motorized
switching.
This
rail would be pushed to the correct position by any trailing wheels
(from the right), but such pushing sideways with wheels would be a
crude, low-speed mechanism which should not replace decent motorized
switching.
The
movable rails in these pictures are straight, as they are used by
both the straight and curved track, and it should be possible to pass
through the straight track at a quite high speed. (The movable
rails are of cause tapered to a minimal thickness in the ends, so
they should not be experienced as bumpy – at
least if rubber wheels are used.)
 Here
is a different variety of the previous design.
Here
is a different variety of the previous design.
 When
it is set for using the curved track, an appropriately curved rail in
the movable double-rail is used. But this conflicts with the
first half of both the upper and lower of the four side walls. (The
two middle side walls must be absent in the switch area for all these
three designs, but generally three of the four side walls will be
available for the passing wheels.)
When
it is set for using the curved track, an appropriately curved rail in
the movable double-rail is used. But this conflicts with the
first half of both the upper and lower of the four side walls. (The
two middle side walls must be absent in the switch area for all these
three designs, but generally three of the four side walls will be
available for the passing wheels.)
The
movable end of each movable rail should (in its outer corner) have a
vertical rod going up to the switching mechanics under the ceiling of
the transition bracket. In case of system malfunction, it should be
possible to operate the switch mechanically from a slowly approaching
train.
The
sideways movement of the bogies in the switch area could be regarded
as corresponding to a very small turning radius, but this is not the
relevant measure here, as the wagons may not really have to turn so
abruptly. This is because the sideways movement, which may correspond
to the width of a beam – about 80 cm – would largely be
performed by suspension rods being displaced sideways across the
wagon roofs. If the suspension system were designed to absorb the
entire sideways bogie shifts in switch areas – ± 80 cm –
even the largest trains could glide smoothly through a switch without
tossing wagons to the side, albeit at a moderate speed. (Switches
should be near stations.)
The
trains depicted here were not designed with this smooth switching in
mind, so they happen to have only something like a ± 40 cm
suspension. This means that while it goes through a switch, the
wagons have to be moved 40 cm to the side, so that the following
suspension rods must be shifted 40 cm to the opposite side, and then
the suspension system has absorbed the sideways movement without
having to rotate wagons around a vertical axis during switching. This
should work satisfactorily for the small (our yellow)
bus/tram-trains, but large trains should be scheduled for passing
only straight through such switches in normal operation.
A
±
80
cm suspension movement would also be useful in conjunction with
stabilizing side wheels (described under The
Suspension). If the suspension unit is made so wide, the
cabin-grabbing frame around it must be correspondingly thinner, but
this shouldn't be problematic. A ±
80
cm suspension movement is definitely a valuable design feature.
Closely
related to the switch area is the simple crossing of two tracks in
the same plane. Also this should be placed on a pole (or equivalent
multipod stand). Crossing should occur at an angle of 45-60 degrees,
so that not both wheels on an axle have to fly at the same time over
the crossing gap. Power lines have to be absent here (like in a
switch area), because they are below the wheel-top level. These
powerless stretches are insignificant, as there are normally other
powered bogies or locomotives in the train. (In the unlikely case of
a full stop for a small train here, the emergency power supply in the
center wagon can power far longer emergency trips.)
Wagon
Exchange
When
two beamway trains meet, it may be useful to transfer a wagon from
one train to the other. This will be done mainly when a long distance
train passes a city (or even a small town) having a local beamway
line. It may be difficult for the long distance train to come
sufficiently close to the center of the city, but even if it could,
it is best for the passengers to be able to choose the city part for
departure or arrival.
The
wagon to be transferred should be the last one in the train, and it
should be a short one in order to be manageable by a local train. A
long distance train could have such a wagon as its third wagon, as
passengers there will not need easy access to the elevator. They will
go to this rear wagon while the train approaches the destination at
which the wagon will be detached. And passengers arriving by an
attaching wagon must immediately leave it.

Two
possible track configurations for wagon exchange.
A small local
train has delivered a wagon (shorter) for a long distance train
expected to come along the straight track. The small train is also
ready to receive (from behind) another wagon. (Track switching is not
shown, but should be obvious.)
The
track configuration to the left may save a few seconds for the long
distance train, as the waiting wagon is waiting a little ahead of the
position in the rightmost configuration. But this is likely to be
unimportant, as the long distance train is likely to have a full stop
for passengers to/from the ground there.
The
incoming long distance train will detach its last wagon in good time
before arrival, so that after this train has passed, the track can be
switched for sending the rear wagon out to the local track. The loose
wagons are supposed to be motorized and computer controlled. They
might then be exchanged while the train passes at high speed,
although this is unlikely to be the chosen procedure.
If
the long distance train isn't met by a local train, it will just
leave the delivered wagon alone. This should then be parked at a
platform by which passengers may descend if they wish.
The
shown track configurations are symmetric, and will work for traffic
in both directions, provided the local train can go through its loop
in the same direction as the long distance train has.
The
Control System
The
trains should detect the identity of the poles they pass, so GPS
navigation should be unnecessary. There should also be some
sort of wireless communication from pole to pole between the
half-beams, perhaps using a waveguide effect. By detecting the
signal signature characteristics of the received signal, it should be
possible to detect irregularities in the beam. The transmitter
should send a complex waveform, and the receiver could Fourier
analyze the signal, checking both the sine and cosine components. The
reference signature, indicating a healthy beam (without birds and
sabotage objects), could be stored locally or in the central
database. Such a path check will be valuable to check if a moving
beam track switch operation has been properly performed.
If
ultrasonic signals could be used, birds may be scared away from the
interior of the beam. The train should also receive information
about the speed limit at this place. This limit will be adjusted
according to special conditions detected at that place.
In
addition to this computer data exchange, there will of cause be at
least voice communication with the train staff, as well as central
monitoring of what happens on the train.
If
poles stand on unstable ground, it will be useful to have strain
gauges in beam holders. The poles should be so adjustable that
incorrect position parameters can be corrected. The correction could
be automatic, using motors in the pole, but it should generally be OK
to have only screws for these adjustments in the poles, so that
workers would go around with power tools for adjusting those screws.
The above mentioned detection of signal signature characteristics
should work between non-adjacent poles, to detect incorrect
positioning of a pole between.
The
front of the train should have a radar (or ultrasonic) obstruction
detector. The interpretation and response choice for these detections
will be far simpler than for road vehicles.
At
some road crossings, it may be useful to detect the approach of extra
high vehicles, by means of e.g. photocells. These detections could
simply be brought to the attention of the conductor.
The
elevator should detect obstacles below it. It will be useful to start
the train while the elevator is going up, so also obstacles ahead of
the elevator should be detected.
The
detection of passengers and their payment status will be important
for the prospect of fully unmanned operation.
Collecting
Energy
The
beamway is already an energy collection grid, as it is ready to
collect energy from regeneratively braking trains, and if it gets too
much energy in this way, it should be able to return the surplus to
the external AC grid. This system should have no problems with
working as a collection system for various types of energy it finds
along its line.
Where
the track lies in the east-west direction, it should be quite simple
to attach solar panels to splints facing south. They could be
vertical, but should preferrably be tilted somewhat upwards. The
width of such a panel assembly could be 10 – perhaps 20 m –
without stressing the beam significantly – at least if the
panel assembly is stiff and balanced at the pole. The height could be
1-1.5 m. With an area of 30 m², an efficiency of 15 %, and the
normal 1000 W/m² sunligth, it would give up to 4500 W. Such
panel assemblies (with interface electronics) could be factory
produced to be hooked onto the upper and lower edge of a splint, and
could be plugged into a connector on the pole – just like the
linear motor stator modules. It should then be possible to deploy a
panel assembly in minutes from the external platform of a service
train.
Solar
panels could also be mounted down on the pole, from the most elegant
type which is flush with the southern surface of the pole, to the
most efficiently tilted (but ugly) flat plate.
A
wave power plant could be combined with a tube or pontoon chain for a
coastal beamway, although beamways will certainly be located mostly
where there is little wave disturbance.
Building
a Beamway
The
most awkward parts to handle are 40 meter long half-beams. Few
roads can handle such beasts, but ships and conventional trains can
handle them, so the building of a beamway line should start at a
point near a harbor or a railway line, or at least a suitably
connected bay, river or straight road. We shall later see how
the beamway can extend itself by transporting its own beams. Normal
poles and (20 meter long) splints should be transportable on normal
roads, but in difficult terrain the beamway may have to transport
also these, however only from a trailer parked on a road which is
hopefully not too far away.
In
difficult terrain, the workers may have to go on foot to the places
where they will build the sockets of the poles. They may have
to do some digging and concrete pouring at those places, but
hopefully a terrain-going concrete transporter with a long hose can
pump concrete into e.g. a plastic mold shaping a pole socket. A
connection mechanism on top of this concrete socket should enable an
aluminum pole to be inserted quite rapidly by helicopter.
The
simplest method is to use racks with two feet which can simply stand
on the ground.

This
is a cross-section of a beam carrier.
The
upper wheels of the beam carrier roll on the beamway like an ordinary
bogie, but they are not motor-driven. The lower wheels carry
the half-beams to be transported.
This
little vehicle is operated by remote control, and can do these
things:
Half-beams
can be pushed to and pulled from carriers when their brakes are on
and clamps are opened. When one or two half-beams have each end
clamped upon a carrier, a long wagon is formed, ready to be pushed by
a locomotive to the place where the beamway is being extended. The
clamps should be quite long along the clamped half-beam (visible on
the left side of the next picture) to dampen pendulation.
If
the beam carriers have a long way to go, their transport capacity can
be greatly increased through a relay race: Each carrier pair (with a
miniloc) will then shuttle back and forth on a small part of the
transport route.

This
is a beam extender, parked in the normal working position. Beam
carriers (to the left) are delivering half-beams (here one, but
normally two), and push a half-beam forward through the (reddish)
rear clamp (which has internal rollers) of the beam extender, and on
to the side-tilted end of the long forward boom.
The
motorized wheel on the boom tip pulls the half-beam forward, while
the rear boom ensures balance by pushing the beam from below. The
rear clamp then helps lifting to the correct position.
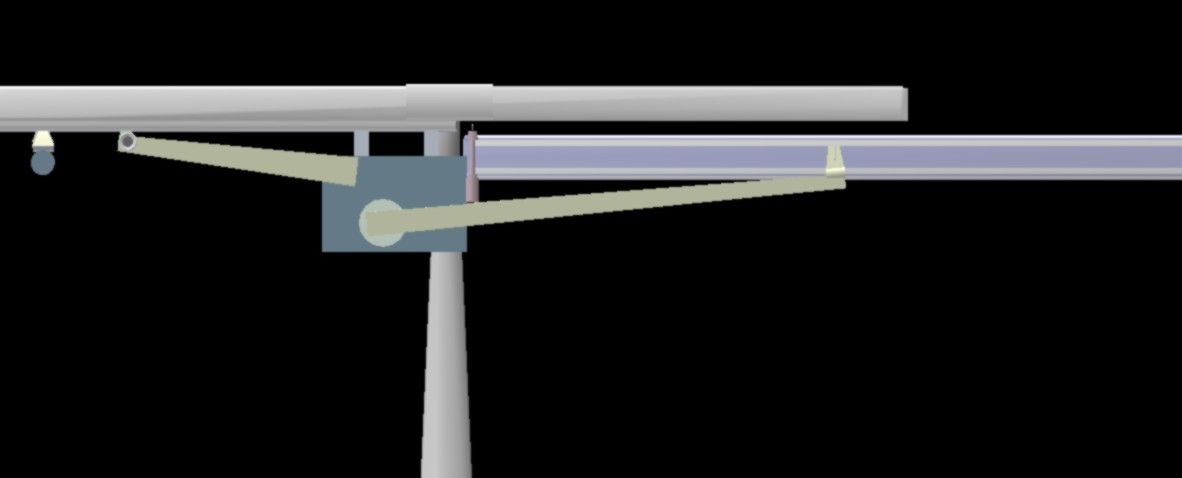
Here
we see the half-beam being lifted up.
(In
this case the splints had been mounted in advance.)
The
end of the half-beam is inserted upon the tongue under the (U-shaped)
transition bracket.
The
beam extender then prepares for the other half-beam by turning both
the boom tip and the rear clamp to the other side, and by lowering
both to the level of the incoming half-beam.
The
splints can then be securely fixed to the beams – by means of
the curled brackets depicted in the beginning of this chapter –
by workers standing on a high side platform of a service vehicle.
The
next step is to mount some clamps about midways between the poles,
and then cover the beam with the plastic, under which the power line
can now be inserted from below.
This
method should also work when the half-beams are staggered –
displaced half a beam length relative to each other. Each
half-beam being mounted will then be pushed half-way through the last
U-bracket – which had been affixed to the end of the previous
(adjacent) half-beam. This staggered mounting will normally be
used in a suspension bridge, when each U-bracket is hanging in a
wire. It may, however, then be more convenient to assemble the
beam below (e.g. on barges), and then hoist it up to its wires.
Perhaps the whole cable-wire-beam assembly will be assembled at
the low site.
Splints
will not be used with such a staggered beam, as each half-beam will
act as a splint for the two half-beams joined at its middle.
In really
difficult terrain – like a mountainside sloping 45 ° to the
side – it will be useful to transport also the poles to their
positions along the growing beam. This should be possible if a
staggered beam is used. A lightweight, collapsed telescoping pole
could hang under a single-wheeled roller which could roll out to the
end of the last half-beam. There the pole (with its attached
U-bracket) is fastened to the end of the half-beam, and the outer
tube of the telescoping tube pair is lowered till its end stands on
firm rock. The bracket foot of this tube is then bolted to the rock.
The pole can be light-weight because the distance between poles will
be half the normal separation when beam staggering is used, and the
poles here are shorter than normal because no traffic taller than
pedestrians (or skiers+snow) will occur in these steep hills.
Tunnels
Tunnels
can be made quite cheaply with an automatized procedure if the beam
is mounted as soon as possible during the process. A utility
tunneling machine could be used for drilling a hole whose
diameter should be <4 meters. Behind this comes a machine that
cuts a slit in the roof, e.g. 90x90 cm. (Such a slit cutter is also
useful for enabling a beamway line to us a road tunnel without making
this tunnel too low for trucks.)
Immediately behind
a special beamway tunnel interface machine should follow. It should
have a telescoping beam whose length can vary with an amount
corresponding to the length of each standard beam piece. And there
should be a special wagon having a container able to receive the
removed slurry material from the tunneling machine, and carry it out
of the tunnel to a suitable dumping place. This wagon should also
bring half-beams and their mounting brackets forward when needed
(when the telescoping beam is able to contract enough to give room
for the next two half-beams), and then mount the half-beams
approximately as described above. (This mounting of half-beams could
be simplified now when the tunnel floor can give support at a known
level.) Attaching brackets in the slit by bolting, and then mounting
J-profile halfbeams (adjustably) in the brackets, may also be
automatized. The waterproofing needed in under-water tunnels may be
remote controlled. (But if the tunnel is above the sea level, leakage
may not be a problem, as a brook may be permitted to occupy the
bottom of the tunnel.)
Measuring tunnel
directions should also be simpler when the beam gives simple-to-use
reference points.

This
tunnel has a diameter of 3.7 meters, containing a train that is 2.35
m wide and 2.40 m tall. The blue contour shows a 20° tilt (with
suspension rods on one side contracted).
The object in the bottom
(50 cm thick) shows how a maintainance worker can be passed. Dumber
creatures can be toppled over to this position without being really
injured. The bottom has also room for accomodating e.g. power
cables.
Stabilizing ailerons (rudders) should be on the lower part
of the front and on the sides of the bottom.
This
wagon shape, which fits so well in tunnels, is anatomically shaped,
being widest at elbow height for sitting passengers. It is also more
aerodynamic regarding cross-winds, giving less wind-induced tilt.
As
tilting may be minimized in tunnels, the tunnel diameter could have
been reduced to 3.4 meters with a 15° tilt. But narrow tunnels
give higher air resistance.
A 2C
Metropolitan System
We should
distinguish between two types of beamway systems:
The metropolitan
system, serving a city and its suburbs
The country-wide
system, covering all areas where trains are needed – also in
terrain inaccessible to heavy machinery
Previous
beamway/monorail systems are clearly locked into a metropolitan
orientation. The beamways use monolithic all-in-one beams (like
SIPEM), and these are designed for metropolitan use, in areas
criss-crossed by roads, so that heavy machinery may be used anywhere.
The beamway designers may know they are designing a metropolitan
system like SwedeTrack, but it would really be unwise of them to
design for incompatibility with country-wide use.
The
present 2C beam system was intended to be country-wide, and to need
little ground machinery support during line construction. So we will
now ask: Can the 2C beam be used in a metropolitan system? It was
conceived to resemble the SIPEM beam (as described by SwedeTrack).
The important system type difference is: Metropolitan systems may be
designed to handle streams of small private cars (single wagon
minitrains), while country-wide systems are unlikely to permit this,
but rather deal with centrally controlled trains. When cars come in
streams, track switching becomes too slow: The cars should do the
switching.
This doesn't
really concern the 2C beam, as track switching is done in the
transition area between sequentially connected beams. When we are
dealing with streams of small cars in a metropolitan system,
levitation mechanisms are quite unlikely. We may assume the vehicles
are rolling on wheels, so for pushing the bogies sideways, it is
natural to think in terms of horizontal wheels meeting vertical walls
in the transition area. Those vertical walls should follow the tracks
going out from the switch area, approximately as if the upper
vertical walls of each outgoing beam started at the incoming beam,
except they should be so high up that the bogies and their wheels can
pass and cross under them.

A
bogie (with blue frame) with a selfswitcher module (white) mounted in
front. It approaches a switch area with guiding walls hanging down
from the ceiling, just above the wheel level.

Seen
from the front: The selfswitcher raises the horizontal wheel on the
side it should turn to, and this wheel engages the wall leading to
the correct out-track. The wall leading straight ahead is here
followed.
The front plate of
the selfswitcher is here removed, so we can see four small wheels
which can slide vertically, each in its own slider. This vertical
movement is restricted by three levers (pivoting around their
centers) which prevent certain dangerous situations. The two lower
levers prevent a horizontal wheel from raising if the opposite
vertical wheel is unable to go down as low as the large wheels. This
prevention will occur in the beam, where the edge of the half-beam
will prevent the vertical wheel from going down, and there is no room
for the horizontal wheel to rise. It will also occur in a switch
which determines the switching, and the bogie is running in a track
with edges preventing the vertical wheel from going down. The third
(upper) lever prevents the selfswitcher from trying to choose both
paths at the same time. (Some detail about the lever movement: The
bolts of the front lever (most horizontal here) don't block the
movement of its companion lever because the pivot bolt goes forward
to the front plate (invisible in the picture). And the right end of
the front lever connects to its slider bolt via a V-shaped bracket
into which the companion lever can go down.)
These safety
mechanisms should of cause be implemented in the programming of the
electronic control system, which receives its input from inductive or
photoelectric detection of any edge below the vertical wheel, so
those small vertical wheels should never be lowered to a track wall.
Towards the end of
the switch area, track walls should rise gradually and finally blend
into the track walls of the half-beams. The small vertical wheels
will roll up these ramps and cause the horizontal wheels to be
lowered – if this lowering had not been done by the electronic
control system.
To
turn the bogies into a certain side track is, however, only half the
job. The other half is to support the bogie whose one side passes the
weak frog area and the adjacent gap for the unchosen track. We have
discussed this before, and seen how a real train with several bogies,
and/or large bogies, can distribute its weight to avoid loading weak
or missing parts of the track. But now we must deal with small
vehicles, for which a rigid suspension may not be enough to keep the
single little bogie level. They need a torque inducing a roll away
from the onsupported side. The horizontal wheels, rolling on the
vertical walls, can provide this torque. If a stronger torque is
required, there could be selfswitchers on both ends of the bogie. The
horizontal wheels resemble those described by SwedeTrak here
(fig. 12&13), but are engaged only when they are used to control
switching. In the present design, the bogies run on all its wheels
all the time, so rubber wheels needn't be dimensioned for
experiencing twice the weight because wheels on one side are lifted
over a central track wall. These walls (at the suspension gap in the
floor) are omitted in the present design, as there are continuous
walls along the outside of the Y-shaped track area, and the walls in
the ceiling prevent the bogie from moving away from the outer track
walls.
When the track
does the switching (and there are probably no ceiling walls), the
movable rail has walls on both sides, so the wheels are properly
guided. (Telescoping axles can increase their length somewhat, but
not become shorter than normal, so they will not cause wheels to come
into the gap.)
A switch area may
be designed for doing the switching only periodically – by
having both movable rails and the guiding walls in the ceiling. When
movable rails are in place, their side walls will prevent
selfswitchers from trying to follow the other route. When the movable
rails are removed from the switch area, selfswitchers are free to
choose route. (But the track may become too uneven for steel wheels
if it were shaped to become even with movable rails in place.)
GTS
GTS
(General Transport System) is a Swedish beamway transport concept, a
successor of Swedetrack's Flyway concept. It is described here.
(In Swedish here)
The
word General in GTS seems to apply to the transport modes covered,
and mainly tries to combine car and rail transport. Cars and the
larger bus/tram/train vehicles seem to be combined, too (at least
according to the illustrations), although small cabins (often called
pods) are emphasized.
The
presently described transport system should be compatible with the
Swedish GTS, but is trying to be general in various (not independent)
dimensions:
Transport
modes:
The (optional) exchangeable
cabins will give generality across modes like train, bus and
boat. High speeds can to some extent replace air transport. Beamways
can cross water stretches in tunnels
under the sea bottom, in submerged
floating tunnels, or on pontoon-carried beams.
Wagon
sizes:
Bus/train formats are emphasized here, but also small,
private vehicles may be accomodated.
Cargo
types:
Passengers, equally light goods, and cars are accomodated.
Cars
are carried in large wagons, mainly for long distances and
crossing difficult terrains. Putting cars inside wagons may seem
inelegant, but passengers can now have their private cabins but
still get access to toilets (and this fact of life is
inelegant).
Assuming people will buy compatible vehicles engenders elegant, but
futile transport schemes.
Ownership:
Passengers
may own (rent) a seat for a ride, a
cabin for a ride, really own a cabin (renting bogies), or really
own a whole wagon (with bogies).
Personal
mobility:
Wheelchairs should be accomodated. The small GTS
vehicles are, according to depictions, evidently not prepared for
wheelchairs. And stairs can be seen to go up to station platforms,
but not elevators.
Traffic
loads:
This is described in the chapter Scalability.
This point covers also a related generality: 24/7 operation. (Can
stations with elevators be open all night?)
Topography:
This
generality implies: Lines can be built also in difficult terrain,
where heavy machinery may not be used for lifting in place the beam.
The (self extendable) 2C beam has
important advantages here.
Line
positioning:
A beamway line can be positioned and easily
repositioned for going in its own tunnels, in road tunnels (where
trains behave like busses), immediately above the ground traffic
(within elevator operation range), or high above the ground (up to
perhaps 20 meters, where the elevator can only be used in unsteadied
emergency mode).
Vertical
movement types (outside stations):
Steady (elevator - for not
needing elevated stations), unsteady (hanging in wires - mainly for
emergency escapes), crash softening straps only, and no vertical
cabin movements.
Speed:
Rural
lines with long distances will need high
speeds. Urban lines with frequent stops will not, but light
trains with good acceleration can still use quite high speeds when
going to and from suburbs. The bendable/twistable 2C
beam will enable high speeds.
Distances:
Toilets
must be available on long distance trips. Telling passengers to
leave and pause at certain toilet-equipped stations is not good
enough, particularly if families are expected to use the transport
system.
This
was about beamways. But if we widen the scope to include conventional
railway, the load weight can be included as an additional
generality. The distribution of the load weight is quite peculiar:
Most of the traffic will be passengers and equally light goods, at
only 7-8 % of the full track load capacity. When high speeds are
emphasized, the traffic percentage will approach 100. When the very
lowest loads dominate in this manner, it is really unwise to
sacrifice generalities 1, 2 and 4-8 in order to maintain weight
generality and its old technical standard – particularly when
the many other advantages mentioned in other chapters here are
considered.
Regulatory
authorities, such as the department of transport in the country, will
discourage or prohibit construction of transport systems lacking
important generalities. Certain generalities, like ensuring personal
mobility by admitting wheelchairs, may simply become mandatory.
(Ensuring this by means of elevators in station buildings may not be
an acceptable alternative to elevators in trains, which may become
mandatory for safe and rapid escape anywhere along the line.) Other
generality deficiencies may be discouraged through economical
mechanisms: Systems with such deficiencies may be disqualified from
receiving governmental financial support. This is presently a quite
important incentive for those building conventional light rail
systems: A national rail standard is often chosen - not because it is
needed for technical reasons, but because it is needed for receiving
governmental financial support. When beamway beams are mounted over
public roads and streets, the conformity pressures must be expected
to become stronger than they are now for conventional rails.
A
local transport system may not need certain generalities, but
permitting such deficient systems to be built, will cause a technical
fragmentation of the infrastructure in the country or state, and it
may make it impossible to merge or extend the local system into an
extended system later. That is: Interoperability may become important
in the future.
Safety
A
beamway train will have an "upper floor" for itself, in
which other objects will rarely come in the way. It can have this
privilege (right of way) even in city areas with heavy traffic.
Others may occasionally use this high space in the beamway's path,
e.g. for construction activities, but will then have to look out for
trains.

A
4.5 meter safety zone is announced here in Dortmund

High-reaching
activities are subject to approval here in Wuppertal.

The
probability for collision might be approximately like the probability
for a train hitting vehicles at a level road crossing, but without
the devastating consequences of people getting hit. It will rather be
about light equipment getting hit by a light train. A beamway train
should have something like a U-shaped aluminium beam along its front
floor for protection against e.g. ladders and boat masts.
A
bus can easily crash due to blunders done by its driver or others on
the road. A tram is safer against blunders from its driver, but
correspondingly less able to prevent accidents caused by others in
the traffic. A beamway only has to look out for objects coming into
its path, and this is such a simple task that it can generally be
dealt with by a computer analyzing the signal from a simple radar
looking ahead from the train front. When an obstruction is detected,
the train will automatically respond with braking strongly. If the
train is going in 200 km/h, and the emergency brake gives a
deceleration of 1 G, the train will stop within 160 meters. At this
speed, the track curvature radius will be at least 630 meters
(assuming a .5 G centrifugal acceleration is tolerated), so those 160
meters ought to be within sight. If they are not, reduced speed may
routinely be used there. Or other indicators may be used. At road
crossings, photocell detectors in the vicinity may be used for
reporting tall vehicles approaching.
In
order to obtain really high run safety, a small unmanned vehicle can
run a few hundred meters ahead of a train. If it hits an obstacle, a
signal is sent back to the train (or a series of signals is
interrupted), which then turns on the emergency brake. This vehicle
may have a video camera and be an extra eye of the train operator.
Such vehicles may also be used for important parcel deliveries.
A
conventional train can easily derail if something falls or is thrown
in its track. A small snow avalanche is enough, and it is simply
assumed in railway operations that nothing happens to the track after
a several minutes old line check. A beamway, however, will not be
affected by moderate avalanches. If snow or dirt heaps up to train
heights, it should be detectable by the radar. The poles in such
areas should be well secured by means of wires or rods anchored up in
the hill, or the beam would jump in long spans. If a pole collapses,
a steel beam will not break, but will go in an awkward bow. Several
poles will have to collapse for the beam to sink the critical four
meters or so. Such a disaster will require a major landslide.
If
such a destruction occurs, the power line and any (fiber optic)
signal cable will probably break, and this should be detectable from
the train. If it is not, the beam will probably be bent so much that
any beam integrity detection system (based on e.g. sending a
microwave signal through the beam and checking for signal signature
changes), should be able to detect it. If it doesn't, it is probably
because the beam approaches the ground too gradually. But then the
ground should be detectable by the radar looking along the beam.
A
most serious condition will be a full beam blockage, most likely a
partial beam breakage, which makes it impossible for the bogies to
pass. The suspensions will then break. The last parts to break will
be the emergency brake straps, which cannot be surprised by forces
coming at an awkward angle. They can now give extra safety if they
have some meters extra length in one or both ends. This length should
slide out with a great counterforce, and finally tear apart something
with its end. A train collapse at high speed will be a series of such
strap breaks. The beam should not be affected by this, as it can
withstand greater forces along its length when they can be
distributed among several poles which are locked at a fixed angle to
the beam.
It
may seem risky to sit five meters above the ground, but a beamway
train is quite unable to simply fall down. It has a series of
suspensions that have to fail, and this would entail a gradual
lowering process even if the brake straps were not ready to yield
perhaps those five meters.
The
train may occasionally pass a deep gorge at greater height, from
which falling down would be catastophic. This could be compared to a
train derailing or a bus leaving the road at the brink of a
precipice. Both these events are probably much more probable then a
beam collapse.
If
these prospects look grim, it is simply because we are considering
scenarios graver than the point at which the conventional railway
simply gives up. A heavy train can give some extra protection through
its strength and weight, but if it hits rock, these properties are
likely to cause dangers from forceful rubble. A light cabin (perhaps
even with a streamlined, upward-bent nose), able to bounce off the
rock, may then be safer.
If
a train gets stuck and evacuation is required, the elevator should be
useful for heights up to at least 20 meters, although only the upper
five meter or so will have stabilizing tubes around the elevator
wires. The train should have backup batteries able to power several
elevator trips. (The elevator motors should have regenerative
braking, and then passenger evacuation will not really require
power.)
Evacuation
from a tunnel or other awkward place can be done to a closely
approaching train, as all trains will have doors in both ends.
Small
material destructions will mainly be regarded as a cause of delays.
Damages to the overhead power lines (and icing on them) frequently
cause delays for railway operations. This will not be a problem with
the well protected power line in the beamway. Rail switches on the
ground can easily get jammed by debris and snow. Not so with the
elevated beam movements. The nineteenth century signalling of trains
is disturbed by various ground conditions, but anybody with a little
knowledge of modern data transmission will regret the adherence to
such old traditions.
Scalability
The
term scalability is used (mostly in connection with information
systems) to indicates a system's ability to either
handle varying amounts of work in a graceful manner or to be readily
enlarged. A design with high scalability will be a more valuable
design, because it has a larger market (with both small and large
population densities), it is economical under low work loads, and it
can work reliably when the work load increases.
Our
beamway design is highly scalable, because it can operate in several
ways with increasing work load:
A
separate elevator module can run alone, unmanned. Each passenger
presses a button to indicate the destination, but the elevator moves
horizontally to the destination between an ascent and a descent.
As
1, but a (small) wagon is attached for increased capacity.
As
2 (or 1) but manned with a guard/operator/driver. This will
generally be required for public transport.
A
second wagon, and/or longer wagon(s) may be used.
More
is invested in the line for increasing the capacity – the
weight capacity and/or the speed. The line may be reinforced with
e.g. cables holding up the beam. It may be equipped with maglev or
linear motor accelerators for increasing the speed.
Using
elevated stations (or side tracks going down towards the ground
level) is one solution for increasing the throughput, but this
elaboration comes with two caveats:
An
elevator is valuable – and will perhaps be required, with
backup batteries – for enabling emergency evacuations between
stations. (An elevator will not slow down the operation if
passengers simply walk through it on elevated stations.)
The
elevator functions as a sluice which (in conjunction with weight
sensors in elevator and wagon suspensions) can prevent overweight
situations automatically.
A
bi-directional line, with one beam for each direction, is, as for
railways in general, an investment which can increase the line
capacity dramatically. But the beamway has an important possibility
here: If poles for two beams are used, the second beam may later be
mounted and removed again – without leaving any trace in the
landscape.
Many
monorail designs have been introduced for serving high traffic loads
only. Common scalability-reducing designer attitudes are:
Assuming
the line has a reserved land area is a serious scalability
impediment.
Conclusion
Many
different solutions have been accumulated here over several years. It
is difficult to state now which are valuable, as research and testing
are needed for drawing such conclusions. Some solutions implied in
old illustrations are probably outdated – like the use of
flanged train wheels. Others are possibilities for future refinement
– like the designs requiring special paraphernalia along the
track, or whatever is done for obtaining the very highest speeds or
getting rid of the beam.
The
important points of departure are:
the
new cross-section picture in The
Beam;
determining through computation and testing how the (external
surface of) this beam should be shaped
using
hub motors (as shown in this picture); supplementing such wheels
with air surfing vanes for (short distance) moderate speed
operation, or with local compressors to obtain higher speeds and
swing resistance for (long distance) higher speeds – as
described in A
Compromise Bogie
The
efficiency of the (partial and full) air cushion hovering schemes
should be investigated.
Changes:
July 23rd 2006:
New chapter: The Wheels.
August 3rd 2006:
New chapter: Switching. Contents table with internal
links. Emphasis on flangeless wheels.
August 7th 2006:
New chapter: Collecting Energy. Agriculture note
under Movable Beams.
September 16th:
2006: New chapter: A 2C Metropolitan System.
February 4th 2008:
Modifications in The Beam: turning and twisting half-beams.
February 26th
2008: New chapter: Transversal
force control.
December 3rd 2008:
New chapters: Crossing Water and The Submerged Floating
Tunnel.
Under The
Beam: how
half-beams can be twisted in the opposite direction, and how brake
pads can act upon the interior of a half-beam.
December 18th
2008: Profile picture with description of the double-walled
half-beam. Description of placing a motor in each wheel.
December 31st
2008: New chapter: Compressed
Air Hovering and Propulsion.
January 9th 2009:
At the end of Hovering Train: About partial levitation.
January 19th 2009:
New chapters: Introduction and The High-speed Train. (+
small additions many places)
January 26th 2009:
New chapter: Beam Irregularities
January
27th 2009: In Compressed Air Hovering and Propulsion: About
how the same bogie can be used with wheels or for air cushion use
February 3rd 2009:
New chapter: A Universal Bogie
March 1st 2009:
New chapter: A lighter Beam?
June 23rd 2009:
New suspension design under Suspension without Poles, and
drawing of “invisible” suspension unit under The
cabins.
January 15th 2010:
More internal links & argumentation for a continuous beam.
May 14th 2010: New
chapter: No Wheels at all?
May 18th 2010: An
additional paragraph appended to No Wheels at all?
May
23rd 2010: Rewritten and expanded Transversal
force control.
May
27th 2010: New chapter: Double
Action Air Cushion.
A paragraph appended in The
Linear Motor
August
8th 2010: New chapter: A
Compromise Bogie. Removed
chapter: Also
a Straddling Train? Changes
in Double
Action Air Cushion:
The 4H beam is rejected. The stability of the Double Action Air
Cushion
is
listed as the 6th major system feature in the introduction.
August
20th 2010: Expanded A Compromise
Bogie. (Mostly
suspension details)
August
30th 2010: New version of the chapter The Beam. New chapter:
Scalability.
November 18th
2010: The chapter Building a Beamway is extended.
December 3rd 2010:
Revised – many details rewritten. Obsolete features removed or
deemphasized.
January
4th 2011: Picture of The Submerged Floating Tunnel included.
January
11th 2011: Important new picture in The Beam. The Beamways
Recommendations article is now fully absorbed here. A Conclusion
chapter appended. Rewriting various places.
January
31st 2011: New chapter: Tunnels, with picture showing
preferred wagon profile and tilt-controlling suspension. In The
Suspension: Supplementary suspension (straps/rods).
February
19th 2011: New chapters: Along
Roads and
Safety.
Also various details added/updated. New drawing of a streamlined
train.
February
28th 2011: New chapter: Wagon
Exchange.
March
9th 2011: New pictures in Along
Roads (Beamway
positioning) and Suspension
without Poles (A-racks).
April
2011: New chapters: Scalability
and
GTS.
Modified power computations in A
Compromise Bogie.
October
27th 2011: Two new generalities in the GTS
chapter.
(Ownership and Vertical movement.)
Copyleft
 Olav
Næss 2006-2013
Olav
Næss 2006-2013
These ideas may be used freely
by anyone – without patenting, of cause.
But please report
important dimensions in such a manner that standards can be
established!